
基于simulink的模糊控制仿真.docx

快乐****蜜蜂


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于simulink的模糊控制仿真.doc
(完整word版)基于simulink的模糊控制仿真(完整word版)基于simulink的模糊控制仿真(完整word版)基于simulink的模糊控制仿真已知系统的传递函数为:1/(10s+1)*e(—0。5s)。假设系统给定为阶跃值r=30,系统初始值r0=0。试分别设计常规的PID控制器;常规的模糊控制器;比较两种控制器的效果;当通过改变模糊控制器的比例因子时,系统响应有什么变化?一.基于simulink的PID控制器的仿真及其调试:调节后的Kp,Ki,Kd分别为:10,1,0。05。示波器观察到的
基于simulink的模糊控制仿真.pdf
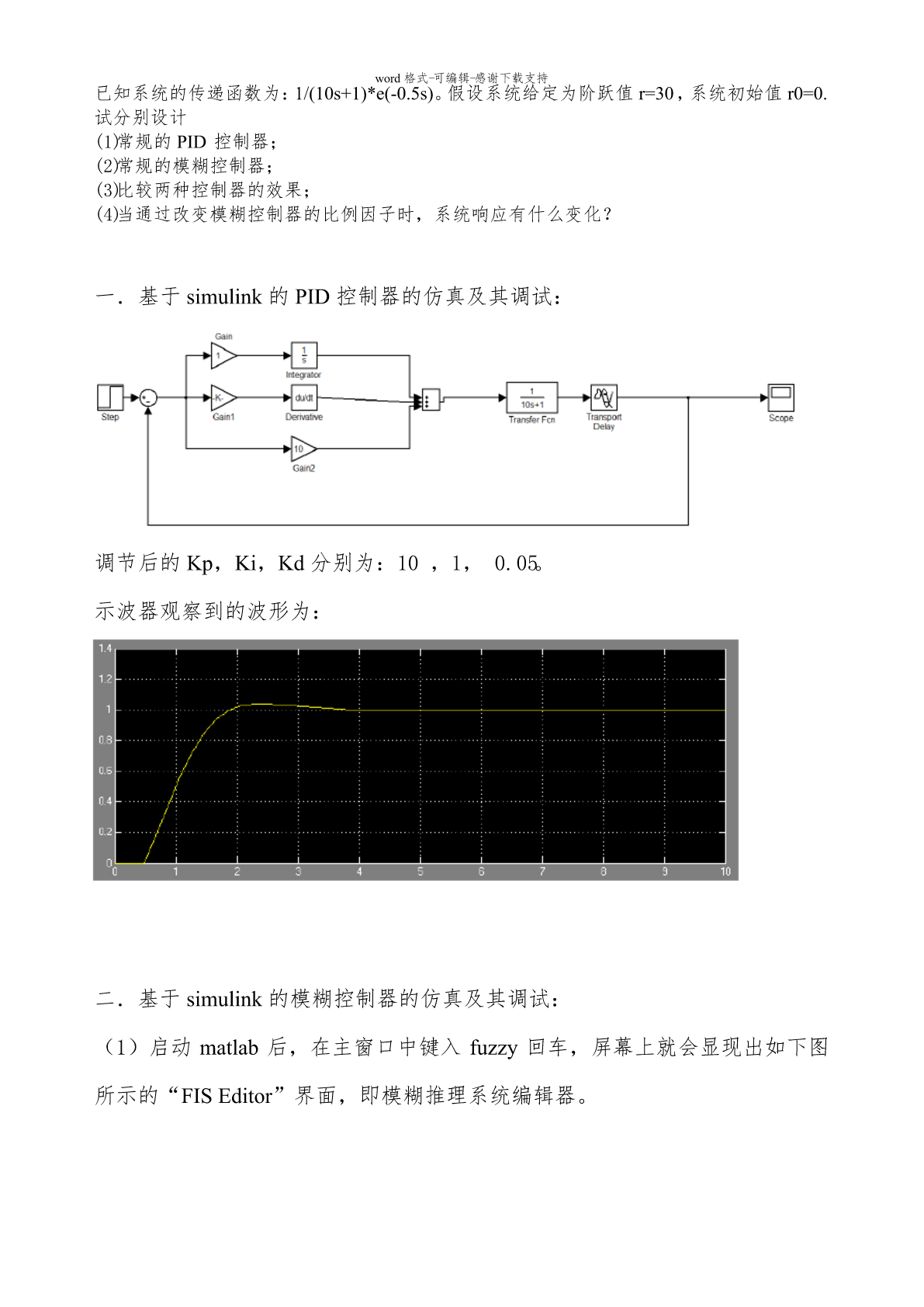
word格式-可编辑-感谢下载支持已知系统的传递函数为:1/(10s+1)*e(-0.5s)。假设系统给定为阶跃值r=30,系统初始值r0=0.试分别设计(1)常规的PID控制器;(2)常规的模糊控制器;(3)比较两种控制器的效果;(4)当通过改变模糊控制器的比例因子时,系统响应有什么变化?一.基于simulink的PID控制器的仿真及其调试:调节后的Kp,Ki,Kd分别为:10,1,0.05。示波器观察到的波形为:二.基于simulink的模糊控制器的仿真及其调试:(1)启动matlab后,在主窗口中键

基于simulink的模糊控制仿真.doc
已知系统的传递函数为:1/(10s+1)*e(-0.5s)。假设系统给定为阶跃值r=30系统初始值r0=0.试分别设计常规的PID控制器;常规的模糊控制器;比较两种控制器的效果;当通过改变模糊控制器的比例因子时系统响应有什么变化?一.基于simulink的PID控制器的仿真及其调试:调节后的KpKiKd分别为:1010.05。示波器观察到的波形为:二.基于simulink的模糊控制器的仿真及其调试:(1)启动matlab后在主窗口中键入fuzzy回车屏幕上就会显现出如下图所示的“FISEditor”
基于simulink的模糊控制仿真.doc
已知系统的传递函数为:1/(10s+1)*e(-0.5s)。假设系统给定为阶跃值r=30系统初始值r0=0.试分别设计常规的PID控制器;常规的模糊控制器;比较两种控制器的效果;当通过改变模糊控制器的比例因子时系统响应有什么变化?一.基于simulink的PID控制器的仿真及其调试:调节后的KpKiKd分别为:1010.05。示波器观察到的波形为:二.基于simulink的模糊控制器的仿真及其调试:(1)启动matlab后在主窗口中键入fuzzy回车屏幕上就会显现出如下图所示的“FISEditor”

基于simulink的模糊控制仿真.docx
已知系统的传递函数为:1/(10s+1)*e(-0.5s)。假设系统给定为阶跃值r=30,系统初始值r0=0.试分别设计常规的PID控制器;常规的模糊控制器;比较两种控制器的效果;当通过改变模糊控制器的比例因子时,系统响应有什么变化?一.基于simulink的PID控制器的仿真及其调试:调节后的Kp,Ki,Kd分别为:10,1,0.05。示波器观察到的波形为:二.基于simulink的模糊控制器的仿真及其调试:(1)启动matlab后,在主窗口中键入fuzzy回车,屏幕上就会显现出如下图所示的“FISEd