
利用AutoCAD解算交会控制点的坐标.docx

快乐****蜜蜂


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

利用AutoCAD解算交会控制点的坐标.docx
利用AutoCAD解算交会控制点的坐标一、项目背景在矿井测量日常工作中,解析交会控制点坐标应用的非常频繁,而我们日常在解算交会点坐标时,一般套用公式来一步一步计算,这样计算不仅耗时长而且需要两人对算后成果才能使用。一个人计算出现错误的机率非常大,如算出的成果有误,会给我们矿井生产带来不堪设想的后果,如巷道打偏等。现在CAD在我们制图方面应用得比较广泛,于是我们就利用CAD来解算交会控制点的坐标以满足我们测量日常工作的需要。二、研究内容及创新点解析控制点的方法有很多,测角交会是其中最为常用的一种。而我们最为
空间后方交会的解算.pdf
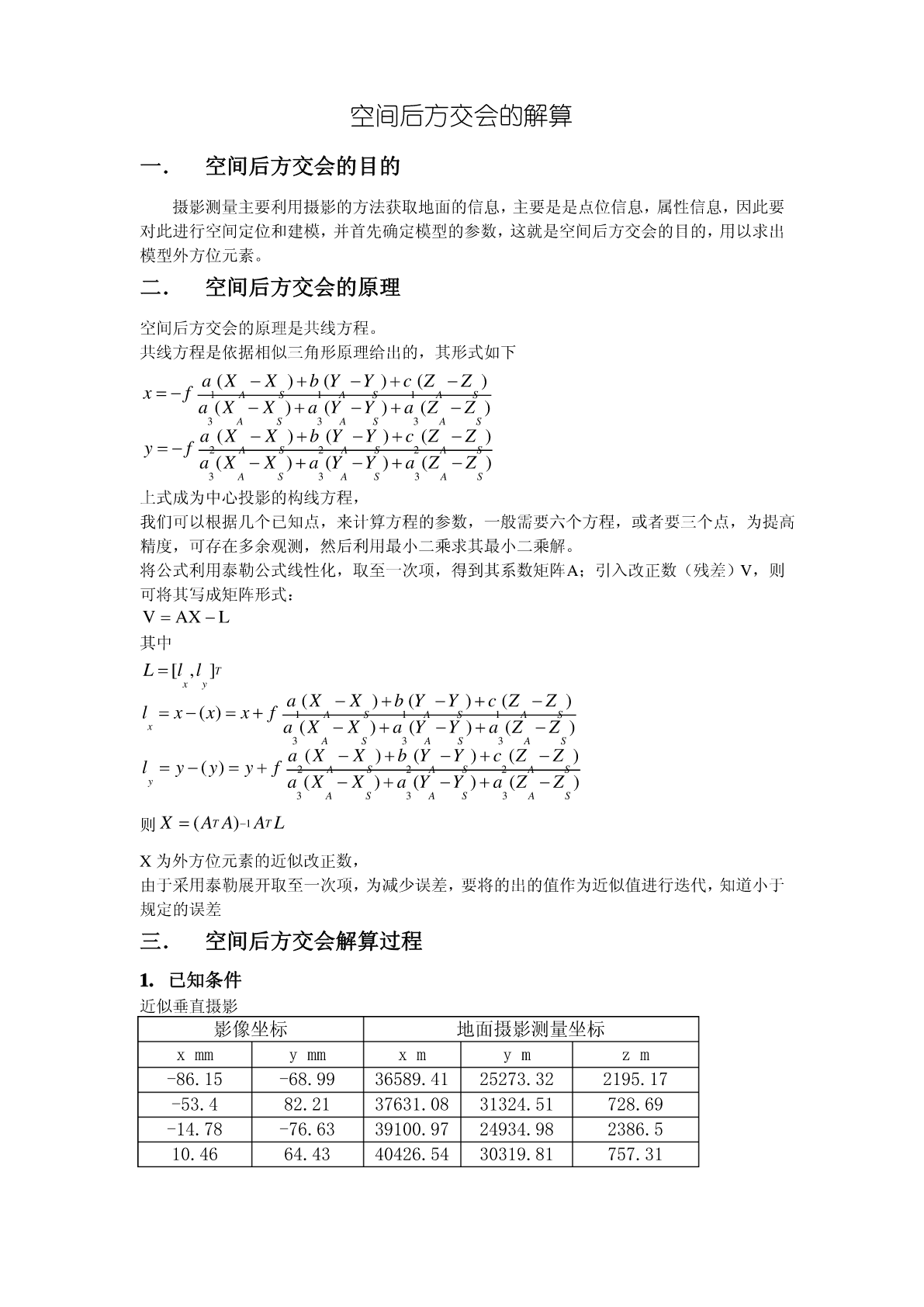
空间后方交会的解算一.空间后方交会的目的摄影测量主要利用摄影的方法获取地面的信息,主要是是点位信息,属性信息,因此要对此进行空间定位和建模,并首先确定模型的参数,这就是空间后方交会的目的,用以求出模型外方位元素。二.空间后方交会的原理空间后方交会的原理是共线方程。共线方程是依据相似三角形原理给出的,其形式如下a(XX)b(YY)c(ZZ)xf1AS1AS1ASa(XX)a(YY)a(ZZ)3AS3AS3ASa(XX)b(YY)c(ZZ)yf2AS2AS2ASa(XX

DH坐标解算.docx
第3章运动学数学建模3.1引言在研究一个复杂的系统之前,首先建立其数学模型。双足竞步机器人作一个复杂的机电系统具有多方面的特性。其中最主要的两个特性就是运动学和动力学特性,这些特性直接决定了其控制系统的设计等相关内容。双足竞步机器人运动学建模的目的旨在给定各个关节运动的前提下,确定双足机器人各个部分的运动学关系;双足竞步机器人本体设计结构复杂,在步行过程中,开链的单脚支撑区与闭链的双脚支撑期交替出现,而且,摆动腿着地时存在冲击,这些因素导致对其很难进行精确的数学建模。为了实现稳定行走和进行有效地步行控制,

GPS控制点布控与解算.doc
GPS布控与解算测绘部曾云亮一、GPS布控原则:(1)GPS网应根据测区实际需要和交通状况进行设计。GPS网的点与点间不要求每点通视,但考虑常规测量方法加密时的应用,每点应有1~2个通视方向。(2)在布网设计中应顾及原有测绘成果资料以及各种大比例尺地形图的沿用,对凡符合GPS-E级网布点要求的旧有控制点,应充分利用其标石。(3)GPS网应由若干个独立观测环构成,也可采用附合线路构成。E级GPS网中每个闭合环或附合线路中的边数E级应≤10(我们常用的就是E级)。(4)为求定GPS点在54北京坐标系中的坐标,

支距法后方交会的解算方法.docx
支距法后方交会的解算方法支距法后方交会是地理测量学中用于解算两个或多个测向角和测距的一种方法。在地理测量学中,后方交会是指借助辅助点和已知点的坐标及观测数据,以推算未知点的坐标和辅助点到未知点的测距。支距法后方交会的解算方法主要包括辅助点坐标和测距的观测、角度纠正、距离计算、方位角计算、坐标解算等步骤。本文将对这些步骤逐一进行详细说明。首先,辅助点坐标和测距的观测是支距法后方交会的第一步。在进行观测前,需要确定观测目标和观测参考点的坐标,并进行标志。观测时需要使用测向仪或全站仪测量两个辅助点之间的水平方向