
一种视频异常行为检测系统.pdf

宏硕****mo


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种视频异常行为检测系统.pdf
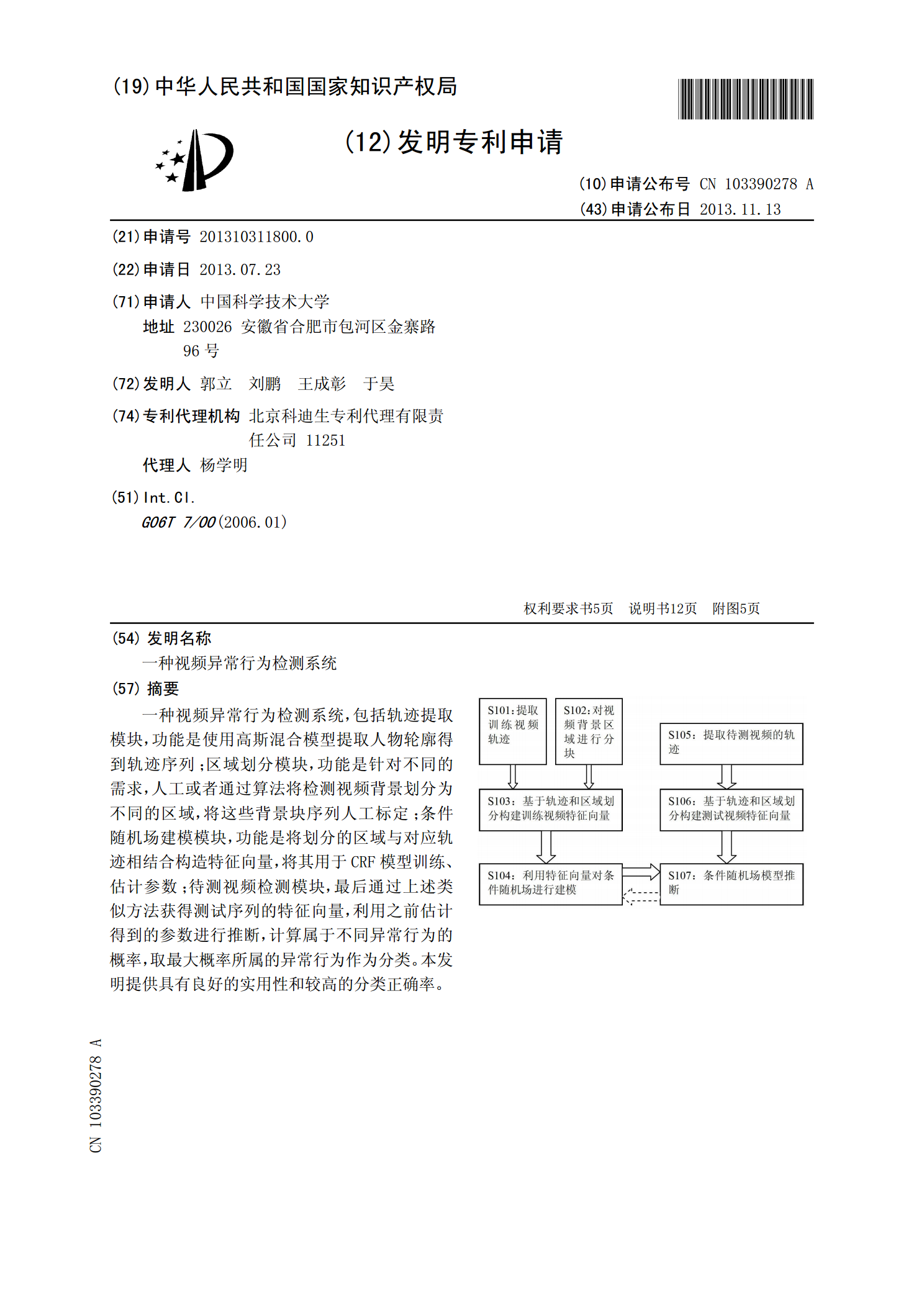
一种视频异常行为检测系统,包括轨迹提取模块,功能是使用高斯混合模型提取人物轮廓得到轨迹序列;区域划分模块,功能是针对不同的需求,人工或者通过算法将检测视频背景划分为不同的区域,将这些背景块序列人工标定;条件随机场建模模块,功能是将划分的区域与对应轨迹相结合构造特征向量,将其用于CRF模型训练、估计参数;待测视频检测模块,最后通过上述类似方法获得测试序列的特征向量,利用之前估计得到的参数进行推断,计算属于不同异常行为的概率,取最大概率所属的异常行为作为分类。本发明提供具有良好的实用性和较高的分类正确率。
一种基于视频监控的电梯异常行为检测方法及系统.pdf
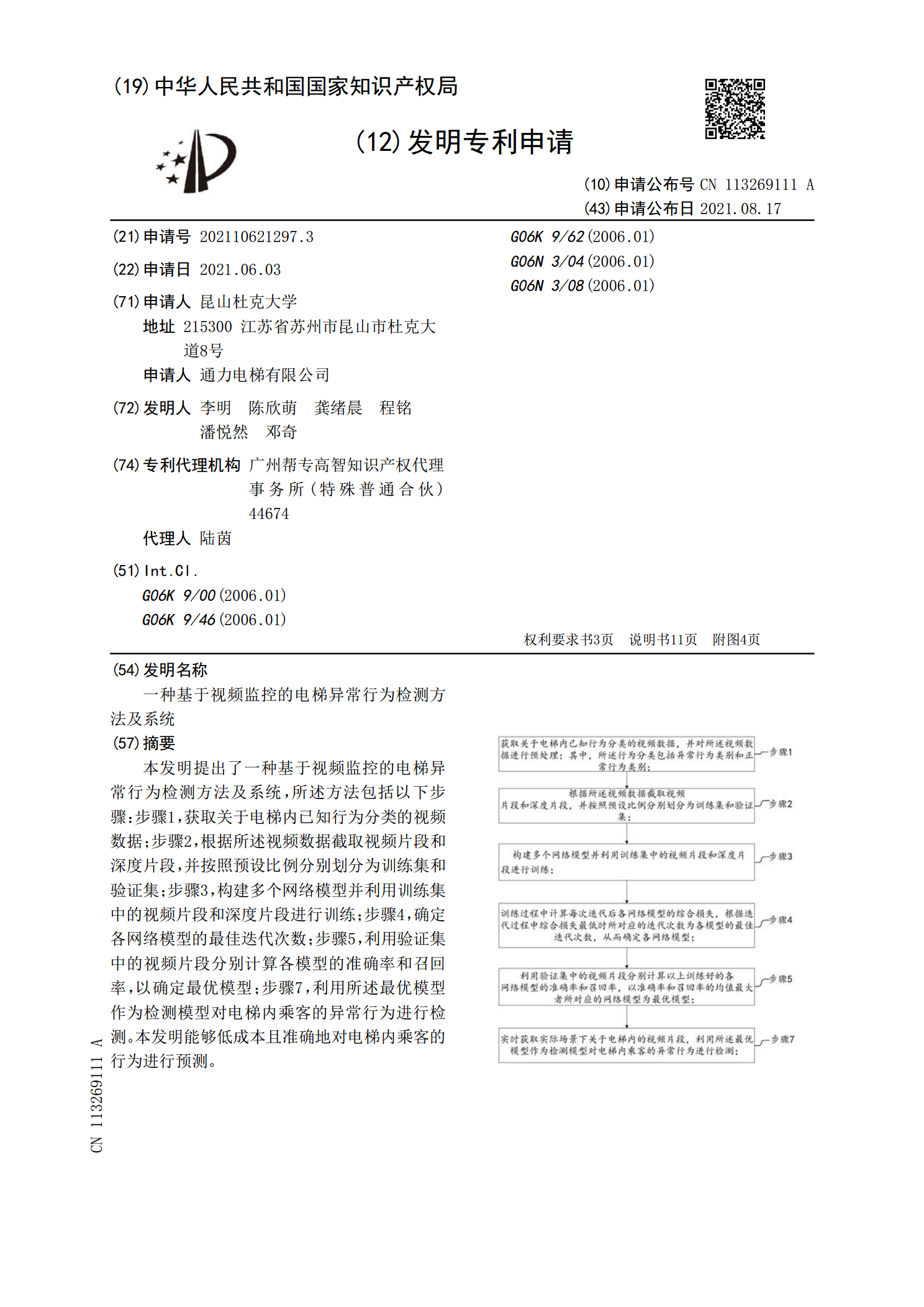
本发明提出了一种基于视频监控的电梯异常行为检测方法及系统,所述方法包括以下步骤:步骤1,获取关于电梯内已知行为分类的视频数据;步骤2,根据所述视频数据截取视频片段和深度片段,并按照预设比例分别划分为训练集和验证集;步骤3,构建多个网络模型并利用训练集中的视频片段和深度片段进行训练;步骤4,确定各网络模型的最佳迭代次数;步骤5,利用验证集中的视频片段分别计算各模型的准确率和召回率,以确定最优模型;步骤7,利用所述最优模型作为检测模型对电梯内乘客的异常行为进行检测。本发明能够低成本且准确地对电梯内乘客的行为进

基于视频的异常行为检测系统的设计与实现.docx
基于视频的异常行为检测系统的设计与实现基于视频的异常行为检测系统的设计与实现摘要:随着数字技术的发展和普及,视频数据的产生和应用越来越广泛。而在视频数据中,异常行为的检测对于安全和监督是至关重要的。本论文旨在设计和实现一个基于视频的异常行为检测系统,以帮助实现自动化的异常行为监测。关键词:视频数据、异常行为、监测、自动化、检测系统1.引言近年来,随着视频技术和计算能力的提升,视频数据的规模和质量也都得到了大幅度的提升。这些视频数据往往包含了丰富的信息,可以用于许多领域,如安防监控、智能交通等。然而,在这些

智能视频监控系统中人体异常行为检测与识别研究.docx
智能视频监控系统中人体异常行为检测与识别研究摘要近年来,随着智能化技术的飞速发展,智能视频监控系统的应用越来越广泛。而在视频监控中,人体异常行为的检测与识别是一项至关重要的任务。本文综述了目前人体异常行为检测与识别技术的研究现状,并重点分析了基于深度学习的人体异常行为检测方法。最后,对未来研究方向进行了展望。关键词:智能视频监控系统;人体异常行为;深度学习;研究现状;未来方向一、引言随着社会的不断进步,人们对于安全问题的重视程度愈发提高。因此,智能化技术在社会中得到了越来越多的应用,其中智能视频监控系统就
智能视频识别系统中异常行为检测综述报告.pptx
汇报人:CONTENTSPARTONEPARTTWO定义与功能技术原理与发展历程应用领域与场景PARTTHREE异常行为检测的概念与分类异常行为检测的背景与重要性异常行为检测的研究现状与趋势PARTFOUR基于深度学习的异常行为检测方法基于特征工程的异常行为检测方法基于模型推理的异常行为检测方法跨域异常行为检测方法PARTFIVE数据标注问题与解决方案模型泛化问题与解决方案实时性要求与解决方案隐私保护问题与解决方案PARTSIX实验设置与数据集介绍实验过程与方法实验结果与分析结果比较与讨论PARTSEVE