
基于无人机航拍序列图像的树木三维重建方法.pdf

论文****轩吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于无人机航拍序列图像的树木三维重建方法.pdf
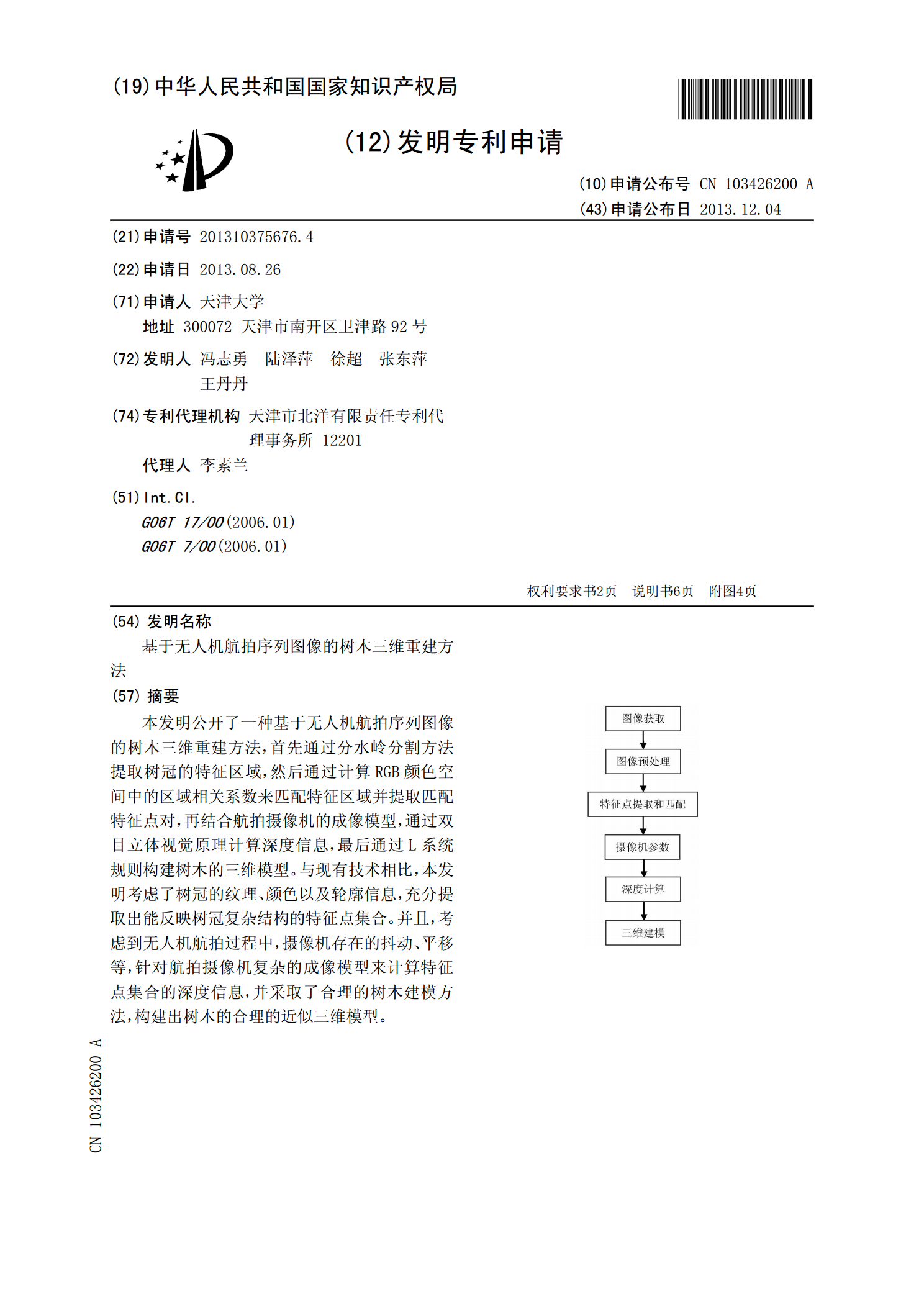
本发明公开了一种基于无人机航拍序列图像的树木三维重建方法,首先通过分水岭分割方法提取树冠的特征区域,然后通过计算RGB颜色空间中的区域相关系数来匹配特征区域并提取匹配特征点对,再结合航拍摄像机的成像模型,通过双目立体视觉原理计算深度信息,最后通过L系统规则构建树木的三维模型。与现有技术相比,本发明考虑了树冠的纹理、颜色以及轮廓信息,充分提取出能反映树冠复杂结构的特征点集合。并且,考虑到无人机航拍过程中,摄像机存在的抖动、平移等,针对航拍摄像机复杂的成像模型来计算特征点集合的深度信息,并采取了合理的树木建模

基于定点航拍图像序列的运动目标跟踪方法.docx
基于定点航拍图像序列的运动目标跟踪方法基于定点航拍图像序列的运动目标跟踪方法摘要:运动目标跟踪是计算机视觉领域的重要研究方向之一。在定点航拍图像序列中,运动目标的跟踪存在着许多挑战,包括背景杂波、快速目标移动和视觉变化等。为了解决这些问题,本文提出了一种基于定点航拍图像序列的运动目标跟踪方法。首先,通过使用背景建模和运动分割技术,将图像序列中的背景与前景分离开来。然后,通过使用特征提取和目标匹配算法,对运动目标进行跟踪和定位。实验证明,该方法在定点航拍图像序列上可以实现准确的目标跟踪。关键词:运动目标跟踪

基于SURF特征的无人机航拍图像拼接方法.docx
基于SURF特征的无人机航拍图像拼接方法基于SURF特征的无人机航拍图像拼接方法摘要:随着无人机技术的迅猛发展,无人机在航拍领域的应用越来越广泛。无人机航拍图像的拼接技术是无人机航拍应用中的一个重要研究方向。本文提出了一种基于SURF(SpeededUpRobustFeatures)特征的无人机航拍图像拼接方法。首先介绍了图像拼接技术的背景和现有的一些方法,然后详细介绍了SURF特征的原理和特点。接下来,提出了基于SURF特征的无人机航拍图像拼接方法,并对各个步骤进行了详细说明。最后,通过实验证明了该方法

基于无人机航拍的公路图像拼接方法研究.docx
基于无人机航拍的公路图像拼接方法研究摘要:本文研究了一种基于无人机航拍的公路图像拼接方法,该方法利用无人机的高空视角和高分辨率图像捕捉功能,不仅可以在拼接图像的清晰度和质量方面优于传统的图像拼接方法,还可以大幅提高工作效率。本文主要分为三个部分,第一部分介绍了图像拼接的基本原理,第二部分阐述了本方法的技术实现,第三部分对实验结果进行了分析与比较,并探讨了该方法的优缺点与应用前景。在实验中,本方法经过验证已经取得了较好的效果,可望在道路巡检、交通规划等领域应用广泛。关键词:无人机;公路图像拼接;视角;高分辨

基于GAN的无人机航拍图像重建.docx
基于GAN的无人机航拍图像重建标题:基于生成对抗网络的无人机航拍图像重建摘要:无人机航拍已经成为现代无人机应用中的重要组成部分。然而,由于许多因素的限制,如传感器精度、天气条件等,无人机航拍图像可能受到噪声、模糊、遮挡等问题的影响,从而影响了图像的质量和可用性。为了解决这一问题,本论文提出了一种基于生成对抗网络(GAN)的无人机航拍图像重建方法。通过设计合适的网络结构和训练策略,我们的方法可以有效地重建高质量和清晰的航拍图像,提高无人机航拍图像的可用性和准确性。实验证明,本方法在重建图像质量上具有显著的优