
一种基于CCD的高精度测量方法.pdf

努力****振宇


1/10
2/10
3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于CCD的高精度测量方法.pdf
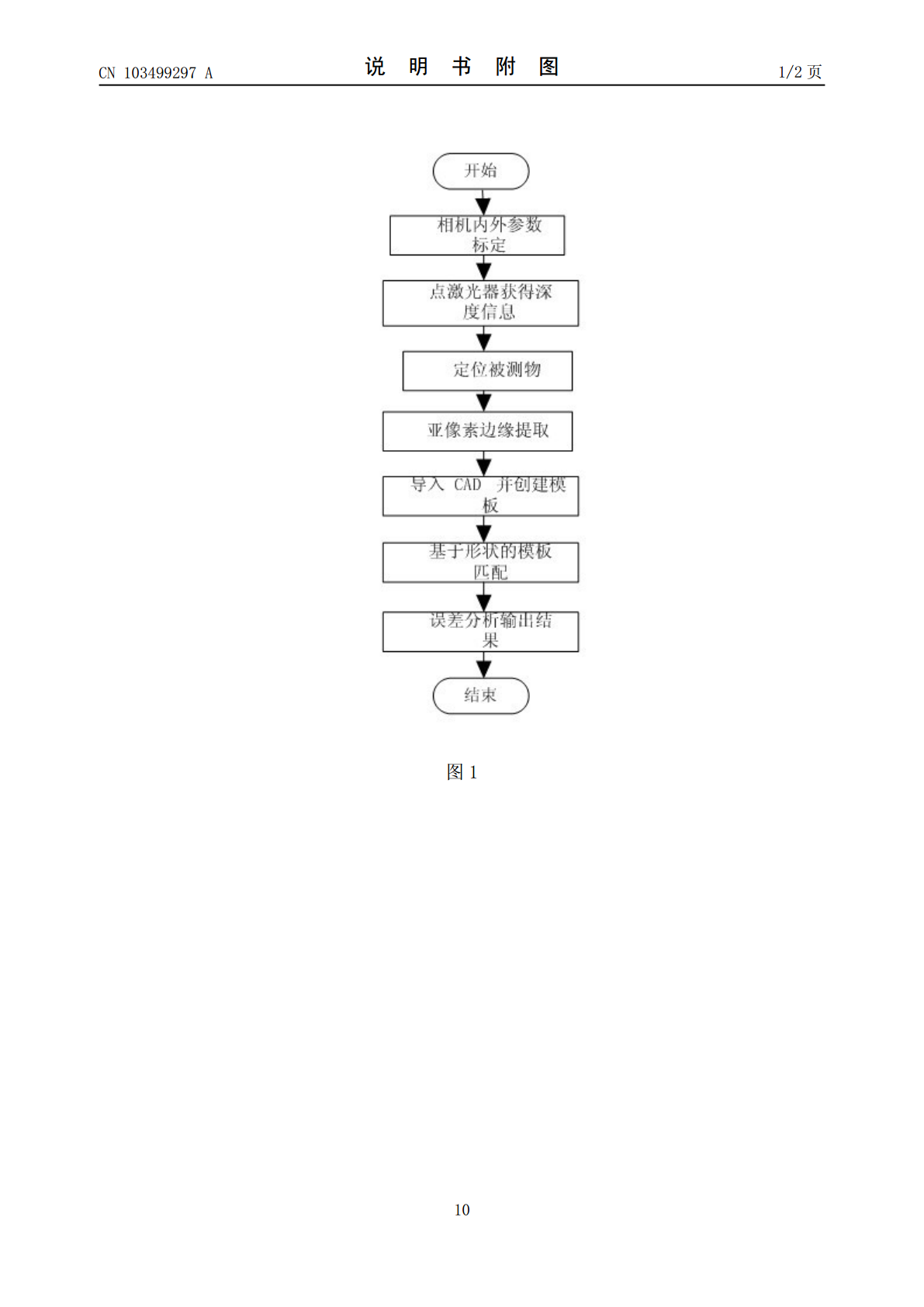
本发明属于机器视觉领域,涉及一种基于CCD的高精度测量方法,突破了目前基于CCD的尺寸测量技术中多用于小尺寸物体测量的局限,该算法构建摄像机成像模型,标定相机内外参数,根据畸变模型和内参数据校正图像;提出了利用邻域信息区分被测物上下表面边缘的方法,采用Canny滤波器提取被测物上表面亚像素边缘信息,根据被检测零件的CAD数据创建模板,利用基于形状的模板匹配算法精确定位识别被测物,根据点激光器获得被测物深度信息,约束并换算被测物上表面姿态,最后将轮廓距离作为被测物加工误差的度量,该算法可应用于大尺寸平面零件

CCD器件几何尺寸的一种高精度的测量方法.docx
CCD器件几何尺寸的一种高精度的测量方法标题:CCD器件几何尺寸的一种高精度测量方法摘要:随着科学技术的不断发展,CCD器件已经成为各种光电子设备中不可缺少的核心部件。为了保证CCD器件的工作性能和可靠性,其几何尺寸的测量是非常重要的。本文基于相关学科的基础知识,探讨了一种高精度测量CCD器件几何尺寸的方法,并对其进行了实验验证。引言:CCD器件是一种基于半导体技术的光电转换器件,通过将光信号转化为电信号,广泛应用于数字相机、摄像机、光谱仪等领域。CCD器件的工作性能受到几何尺寸的影响,因此准确测量其几何

一种基于DSP的高精度频率测量方法.docx
一种基于DSP的高精度频率测量方法引言:在现代通讯、广播、雷达、成像、等领域中,许多应用需要高精度的频率测量,以满足其高速、高精度的信号处理要求。在实际的频率测量过程中,通常需要一个可靠、精确、实时的系统来监测和测量频率,以判断信号的正常和异常。数字信号处理器(DSP)的出现为频率测量提供了新的思路和方法。本文将介绍一种基于DSP的高精度频率测量方法。主体:1.数字信号处理器DSP是一种专门的处理数字信号的微处理器,具有高度的集成度、高速度、多功能性、低功耗、易编程等特点,并被广泛应用于音频、图像、通信等

一种基于彩色CCD相机的碳氢火焰温度测量方法.pdf
本发明公开了一种基于彩色CCD相机的碳氢火焰温度测量方法,目的在于,被测对象测温范围不受黑体炉标定实验的限制,无需用到黑体炉。包括以下步骤:1)拍摄碳氢火焰:设置彩色CCD相机的参数,对火焰进行拍摄;2)获得温度与两基色原始强度比值之间的关系曲线:通过相机响应效率曲线获得温度与R、G、B通道所记录的原始强度比值的关系曲线;3)获取R、G、B真彩色图像:从彩色CCD相机中输出RAW格式图像,并将RAW格式图像最终转化为R、G、B真彩色图像;4)获取两基色比值:从R、G、B真彩色图像中得到R、G、B三通道原始

一种基于双准直光束的单CCD滚转角测量方法.docx
一种基于双准直光束的单CCD滚转角测量方法摘要本文提出了一种基于双准直光束的单CCD滚转角测量方法,采用了双准直光束的设计,通过测量不同位置处的准直光束与参考平面的交点位置,计算出系统测得的滚转角,实现了对目标物体滚转角的测量。在实验中,该方法的精度能够达到0.1度左右。关键词:双准直光束;单CCD;滚转角测量引言在许多航空航天和工业制造领域中,对物体的滚转角进行精确测量是非常重要的。其中,滚转角是指物体沿着其自身轴线进行旋转时发生的角度。在飞行器和导航系统中,准确测量机身的滚转角是非常重要的,因为它可以