
一种五自由度混联机器人运动学分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种五自由度混联机器人运动学分析.docx
一种五自由度混联机器人运动学分析介绍:混联机器人是指由多个机械臂以某种方式组合而成的多自由度机器人系统。这种机器人广泛应用于制造业、医疗、交通等领域。混联机器人的优点是可以协同完成复杂的任务,大幅提高生产效率。本文将介绍一种五自由度的混联机器人的运动学分析方法。方法:我们首先考虑这个混联机器人的结构:它由两个平面机械臂、一个球形关节、一个固定平台和一个移动平台组成。两个平面机械臂可以进行水平方向的运动,球形关节可以进行球形旋转控制,固定平台提供整个混联机器人的支撑,而移动平台则可以控制整个机械臂的终端工具

一种新型的五自由度混联抛光机器人的分析.docx
一种新型的五自由度混联抛光机器人的分析标题:五自由度混联抛光机器人的分析引言:随着科技的不断发展,机器人技术在工业领域的应用日益广泛。其中,混联抛光机器人作为一种新型的自动化设备,具备高效、精准、重复性等优势,被广泛应用于金属、陶瓷、塑料等制造领域。本论文旨在对五自由度混联抛光机器人进行分析,并探讨其工作原理、应用领域以及未来发展方向。一、机器人工作原理:五自由度混联抛光机器人采用机械和电器混联控制方式,由五个关节驱动器、执行器和传感器等组成。通过精确的控制系统,实现机器人的移动、旋转和抛光等操作。其工作
一种五自由度混联下肢康复机器人.pdf
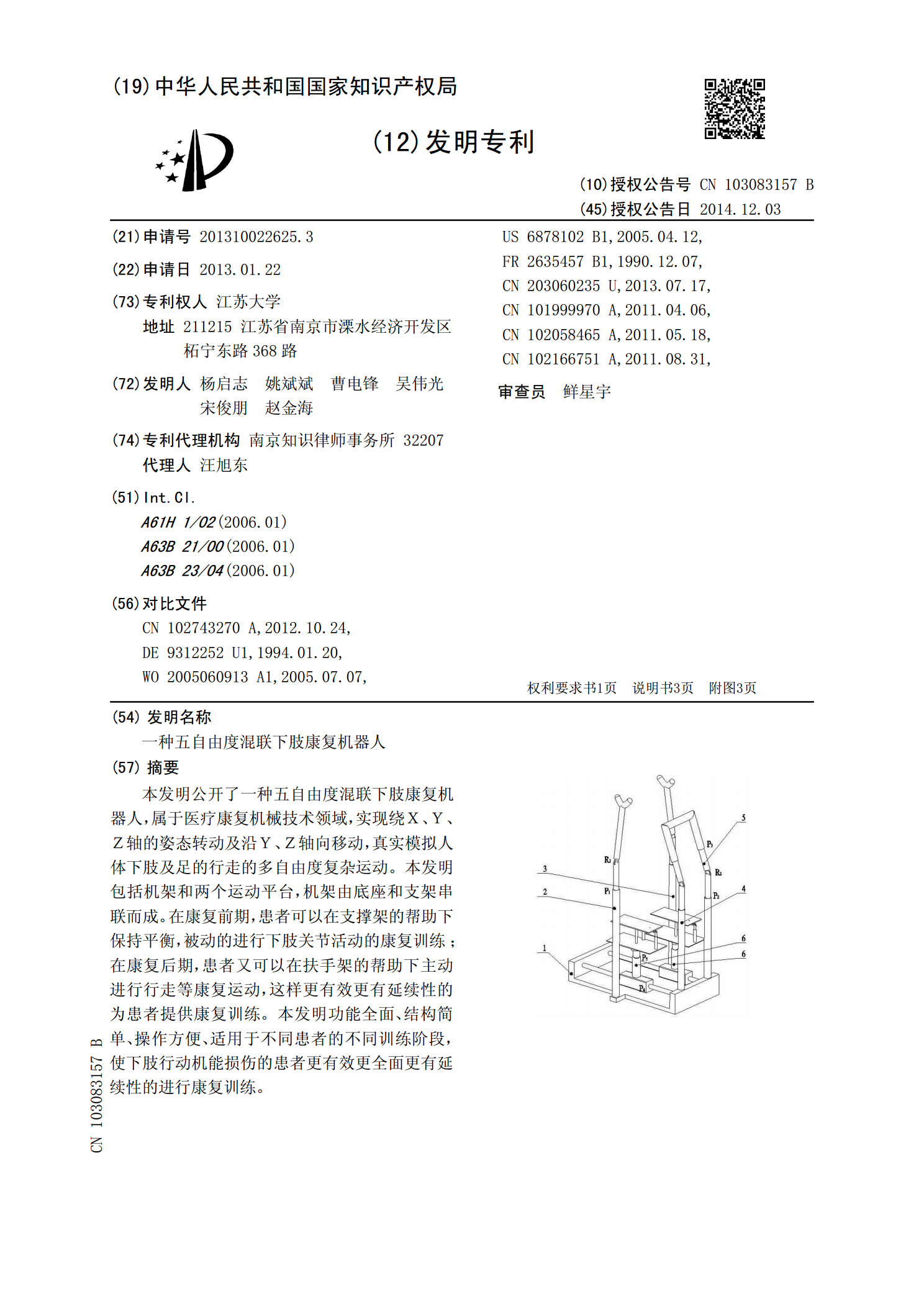
本发明公开了一种五自由度混联下肢康复机器人,属于医疗康复机械技术领域,实现绕X、Y、Z轴的姿态转动及沿Y、Z轴向移动,真实模拟人体下肢及足的行走的多自由度复杂运动。本发明包括机架和两个运动平台,机架由底座和支架串联而成。在康复前期,患者可以在支撑架的帮助下保持平衡,被动的进行下肢关节活动的康复训练;在康复后期,患者又可以在扶手架的帮助下主动进行行走等康复运动,这样更有效更有延续性的为患者提供康复训练。本发明功能全面、结构简单、操作方便、适用于不同患者的不同训练阶段,使下肢行动机能损伤的患者更有效更全面更有

具有冗余自由度的混联自动钻铆机运动学分析.docx
具有冗余自由度的混联自动钻铆机运动学分析摘要:本论文基于混合联合自动钻铆机器人,研究了其运动学分析。通过对机器人的结构和运动方式进行了详细分析和理论推导,得到了机器人的正运动学和逆运动学方程式,并在Matlab软件中进行了数值求解。同时,通过实例验证和仿真分析,证明了该方法的正确性和有效性。最后,对研究结果进行了总结与展望。关键词:混合联合自动钻铆机器人;运动学分析;正逆运动学方程;数值求解;仿真分析引言:混合联合自动钻铆机器人是一种新型的自动化设备,广泛应用于航空航天、汽车制造、机械制造等领域。与传统的

串并混联四足机器人腿机构的设计及运动学分析.docx
串并混联四足机器人腿机构的设计及运动学分析串并混联四足机器人腿机构的设计及运动学分析一、引言机器人技术在现代工业和科学研究中扮演着重要的角色。四足机器人作为一种常见的机器人类型,具有稳定性好、适应性广、穿越能力强等特点,被广泛应用于各个领域。机器人的腿机构设计和运动学分析是实现机器人稳定行走的关键环节。本文将着重探讨串并混联四足机器人腿机构的设计原理和运动学分析方法。二、串并混联四足机器人腿机构的设计原理串并混联四足机器人腿机构是指将多个腿通过串并、混联的方式连接到机器人的主体部分。串联方式使得整体机器人