
一种激光同步扫描视觉系统的分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种激光同步扫描视觉系统的分析.docx
一种激光同步扫描视觉系统的分析激光同步扫描视觉系统是一种以激光为光源,利用激光的高亮度和直线性进行光源投射和影像捕捉的技术。该技术的主要应用领域为自动化生产线上的质量控制和产品检测,以及机器人视觉导航等。本文将对激光同步扫描视觉系统的原理和应用作出详细分析。一、激光同步扫描视觉系统的原理激光同步扫描视觉系统主要由激光发射器、摄像头、物体、控制器组成。首先,激光发射器将激光光束投射到待检测物体上。光束照射到物体上,并发生反射或散射,形成跟踪区域。接下来,摄像头开始捕捉反射或散射回来的影像,并传输给控制器进行

视觉反馈激光扫描系统.pdf
本发明提供的视觉反馈激光扫描系统用于在条形码上指示出可扫描区域以及扫描完成的视觉反馈,包括激光源和激光扫描模块,还包括驱动模块和自动偏转模块,所述激光扫描模块获取到条形码符号信息后向所述驱动模块传递扫描成功状态信息,所述驱动模块根据接收到的扫描成功状态信息控制所述自动偏转模块运动。本发明的视觉反馈激光扫描系统通过旋转部件的旋转改变激光束的传播方向以及人眼的视觉暂留现象使得在条形码上形成激光扫描图案,从而直观地显示出了扫描区域的位置,同时通过在扫描完成后改变激光扫描图案来实现对扫描完成的视觉反馈,操作简单,
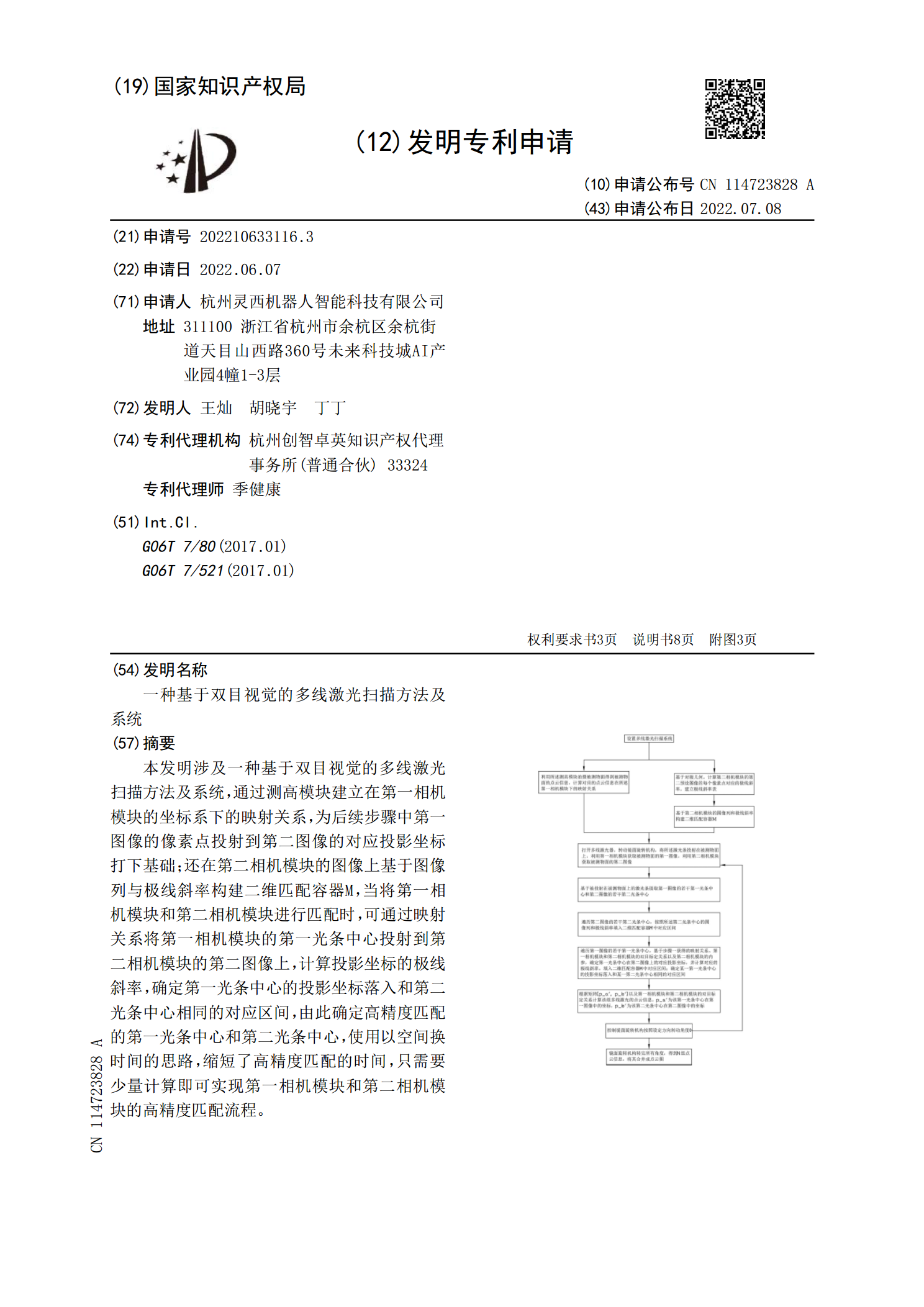
一种基于双目视觉的多线激光扫描方法及系统.pdf
本发明涉及一种基于双目视觉的多线激光扫描方法及系统,通过测高模块建立在第一相机模块的坐标系下的映射关系,为后续步骤中第一图像的像素点投射到第二图像的对应投影坐标打下基础;还在第二相机模块的图像上基于图像列与极线斜率构建二维匹配容器M,当将第一相机模块和第二相机模块进行匹配时,可通过映射关系将第一相机模块的第一光条中心投射到第二相机模块的第二图像上,计算投影坐标的极线斜率,确定第一光条中心的投影坐标落入和第二光条中心相同的对应区间,由此确定高精度匹配的第一光条中心和第二光条中心,使用以空间换时间的思路,缩短
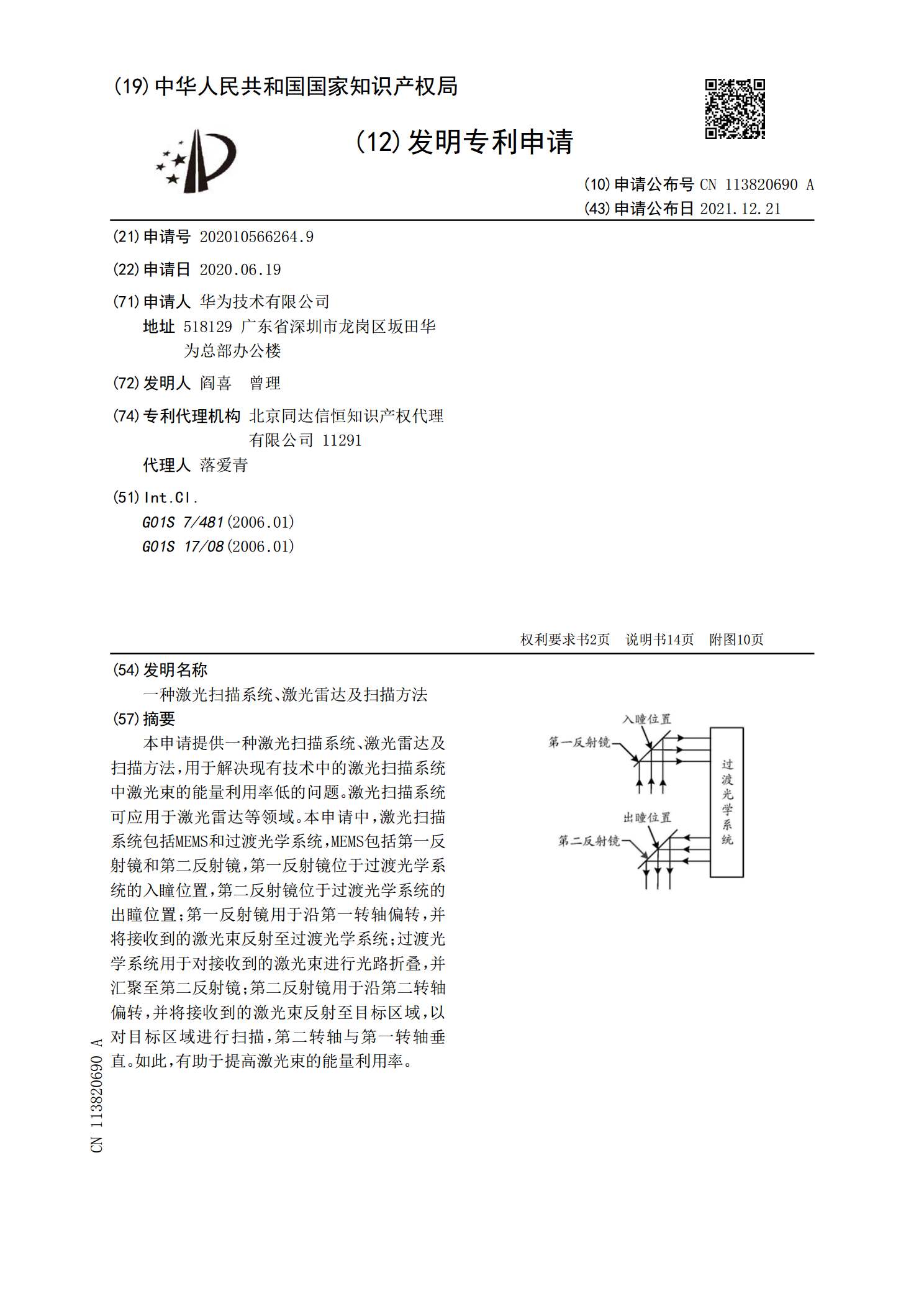
一种激光扫描系统、激光雷达及扫描方法.pdf
本申请提供一种激光扫描系统、激光雷达及扫描方法,用于解决现有技术中的激光扫描系统中激光束的能量利用率低的问题。激光扫描系统可应用于激光雷达等领域。本申请中,激光扫描系统包括MEMS和过渡光学系统,MEMS包括第一反射镜和第二反射镜,第一反射镜位于过渡光学系统的入瞳位置,第二反射镜位于过渡光学系统的出瞳位置;第一反射镜用于沿第一转轴偏转,并将接收到的激光束反射至过渡光学系统;过渡光学系统用于对接收到的激光束进行光路折叠,并汇聚至第二反射镜;第二反射镜用于沿第二转轴偏转,并将接收到的激光束反射至目标区域,以对

一种激光扫描系统.pdf
本发明实施例中提供一种激光扫描系统,包括激光器、准直单元、激光模式切换组件、微机电结构反射元件、成像系统以及光电探测器,通过激光模式切换组件和反射元件对高斯光束进行光束整形处理和特异性角度控制,使其可以精准地定位在需要成像和监测的机械臂位置上,提高了测量的灵活性和准确性;利用成像系统将机械臂上反射回来的光束进行解析,不仅实现对机械臂的轮廓采集、精准定位和反馈校正,而且降低了光学结构的复杂性,有助于提升整体系统的集成效果。