
SMA丝驱动的仿象鼻柔性机械手的研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

SMA丝驱动的仿象鼻柔性机械手的研究.docx
SMA丝驱动的仿象鼻柔性机械手的研究摘要:本文详细介绍了一种基于SMA丝驱动的仿象鼻柔性机械手的研究。首先,阐述了机械手的工作原理,然后介绍了SMA丝的物理特性,并对SMA丝进行了实验研究,得出了合适的电流和温度范围。接下来,建立了机械手的数学模型,并对其进行了数值分析。最后,进行了仿真实验,证明了机械手的稳定性和灵活性。正文:一、背景机械手是一种重要的工业设备,广泛应用于机器人、电子装配、医疗、教育等领域。目前,传统机械手存在着刚性大、重量大、精度低等问题,难以适用于许多应用环境。为了解决这些问题,学者
一种基于SMA丝驱动的仿人灵巧手手指.pdf
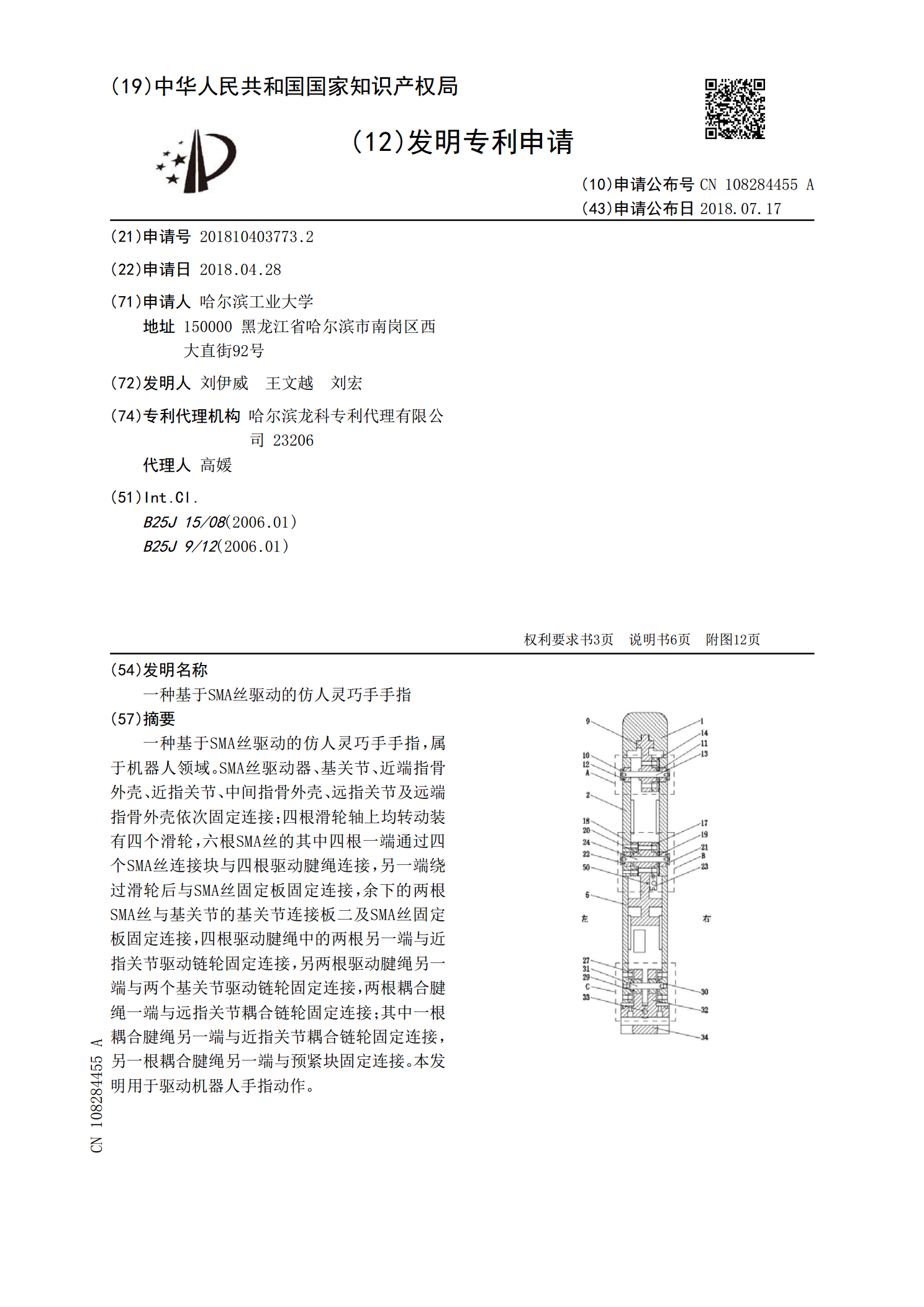
一种基于SMA丝驱动的仿人灵巧手手指,属于机器人领域。SMA丝驱动器、基关节、近端指骨外壳、近指关节、中间指骨外壳、远指关节及远端指骨外壳依次固定连接;四根滑轮轴上均转动装有四个滑轮,六根SMA丝的其中四根一端通过四个SMA丝连接块与四根驱动腱绳连接,另一端绕过滑轮后与SMA丝固定板固定连接,余下的两根SMA丝与基关节的基关节连接板二及SMA丝固定板固定连接,四根驱动腱绳中的两根另一端与近指关节驱动链轮固定连接,另两根驱动腱绳另一端与两个基关节驱动链轮固定连接,两根耦合腱绳一端与远指关节耦合链轮固定连接;

基于SMA丝驱动的水下增程式推进装置研究.docx
基于SMA丝驱动的水下增程式推进装置研究摘要本文研究了基于SMA丝驱动的水下增程式推进装置。介绍了SMA丝的特性、优缺点以及在水下推进装置中的应用。并探讨了基于SMA丝的水下增程式推进装置的结构、工作原理和性能优势,对未来的研究方向进行了展望。关键词:SMA丝驱动;水下增程式推进装置;工作原理;性能优势引言随着科技的不断进步,水下探测技术和水下作业技术逐渐成为了热门领域。而水下增程式推进装置则成为了水下探测和作业的重要装置之一。在水下环境中,水的密度相对较大,阻力也较大,传统的电动推进装置性能有限,不能很

SMA人工肌肉柔性仿人灵巧手的设计与实验研究.docx
SMA人工肌肉柔性仿人灵巧手的设计与实验研究论文标题:SMA人工肌肉柔性仿人灵巧手的设计与实验研究摘要:随着机器人技术的不断发展,人工肌肉逐渐成为研究的热点之一。在本研究中,我们设计和实验了一种基于形状记忆合金(SMA)的人工肌肉柔性仿人灵巧手。首先,我们介绍了SMA材料的特点以及其在机器人领域的应用潜力。然后,我们详细描述了人工肌肉的设计原理和结构,包括SMA线材的选择、气动系统的设计和控制方法。接下来,我们进行了一系列实验,验证了该人工肌肉的灵活性和灵巧性。实验结果表明,人工肌肉能够实现精细的控制和多

电-气复合驱动柔性机械手的设计与研究.docx
电-气复合驱动柔性机械手的设计与研究电-气复合驱动柔性机械手的设计与研究摘要:随着工业自动化的迅速发展,对柔性机械手的需求也越来越高。本论文以电-气复合驱动柔性机械手的设计与研究为主题,以提高柔性机械手的工作效率和灵活性为目标,分析了电-气复合驱动技术在柔性机械手中的应用,并对柔性机械手的设计和优化进行了深入研究。关键词:柔性机械手、电-气复合驱动、工作效率、灵活性一、引言柔性机械手作为一种能模仿人手动作并完成复杂工作的机器人,广泛应用于工业自动化生产线中。然而,传统的柔性机械手在工作效率和灵活性方面存在