
车载激光扫描仪外参数标定方法设计与实现.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

车载激光扫描仪外参数标定方法设计与实现.docx
车载激光扫描仪外参数标定方法设计与实现随着激光雷达技术的不断发展,车载激光扫描仪在自动驾驶、地图制作、三维重建等领域中越来越得到广泛应用。车载激光扫描仪外参数标定方法是车载激光扫描仪技术的一个关键部分,其作用是对激光扫描仪外部参数进行标定,以便提高数据的准确性和可靠性。在本文中,我们将探讨车载激光扫描仪外参数标定及其实现方法。一、概述外部参数是指激光雷达系统相对于车辆的位置和姿态参数,而这些参数直接影响激光雷达数据的准确性。因此,准确的外部参数标定对于车载激光扫描仪的使用至关重要,其意义在于通过测量标定板

一种车载多线激光雷达与IMU外参数自动标定方法及装置.pdf
本发明提供一种车载多线激光雷达与IMU外参数自动标定方法及装置,该方法通过在标定板上挖取圆孔作为激光雷达可识别特征,计算在激光雷达坐标系下标定板四个角点的坐标,结合车载GPS/IMU的绝对位姿信息,实现与标定板上WGS?84控制点的同名点配对,最后采用高斯牛顿法求解出激光雷达与IMU的外参矩阵。通过该方案可以降低标定场景要求,实现自动化外参标定,能有效提高标定效率,避免人为因素影响,保障标定结果的准确性和可靠性。

车载激光扫描测量系统外标定方法的研究和实现.docx
车载激光扫描测量系统外标定方法的研究和实现车载激光扫描测量系统外标定方法的研究和实现摘要:车载激光扫描测量系统外标定方法的研究与实现对于车载激光扫描测量系统的准确性和可靠性具有重要意义。本论文通过对车载激光扫描测量系统的工作原理和标定方法进行详细介绍,并对现有的标定方法进行总结和评价。同时,本论文提出了一种基于于轨迹匹配的车载激光扫描测量系统外标定方法,并进行了实验验证,结果表明该方法具有较高的准确性和可靠性,能够满足车载激光扫描测量系统的实际需求。关键词:车载激光扫描测量系统;外标定;轨迹匹配一、引言车

车载里程仪参数的实时标定方法.docx
车载里程仪参数的实时标定方法标题:车载里程仪参数实时标定方法摘要:车载里程仪是一种常用的设备,用于准确测量车辆行驶的距离和速度。为了保证车载里程仪输出的数据的准确性和可靠性,需要对其进行实时标定。本文介绍了车载里程仪的工作原理、标定方法的原理和实现,最后通过实验验证了该标定方法的有效性。1.引言车载里程仪在车辆行驶过程中起到了非常重要的作用,它可以测量车辆的行驶距离和速度,对车辆的工作状态进行监测和控制。然而,由于车辆行驶环境的复杂性和各种因素的干扰,车载里程仪的参数会发生偏差,导致数据的准确性受到影响。
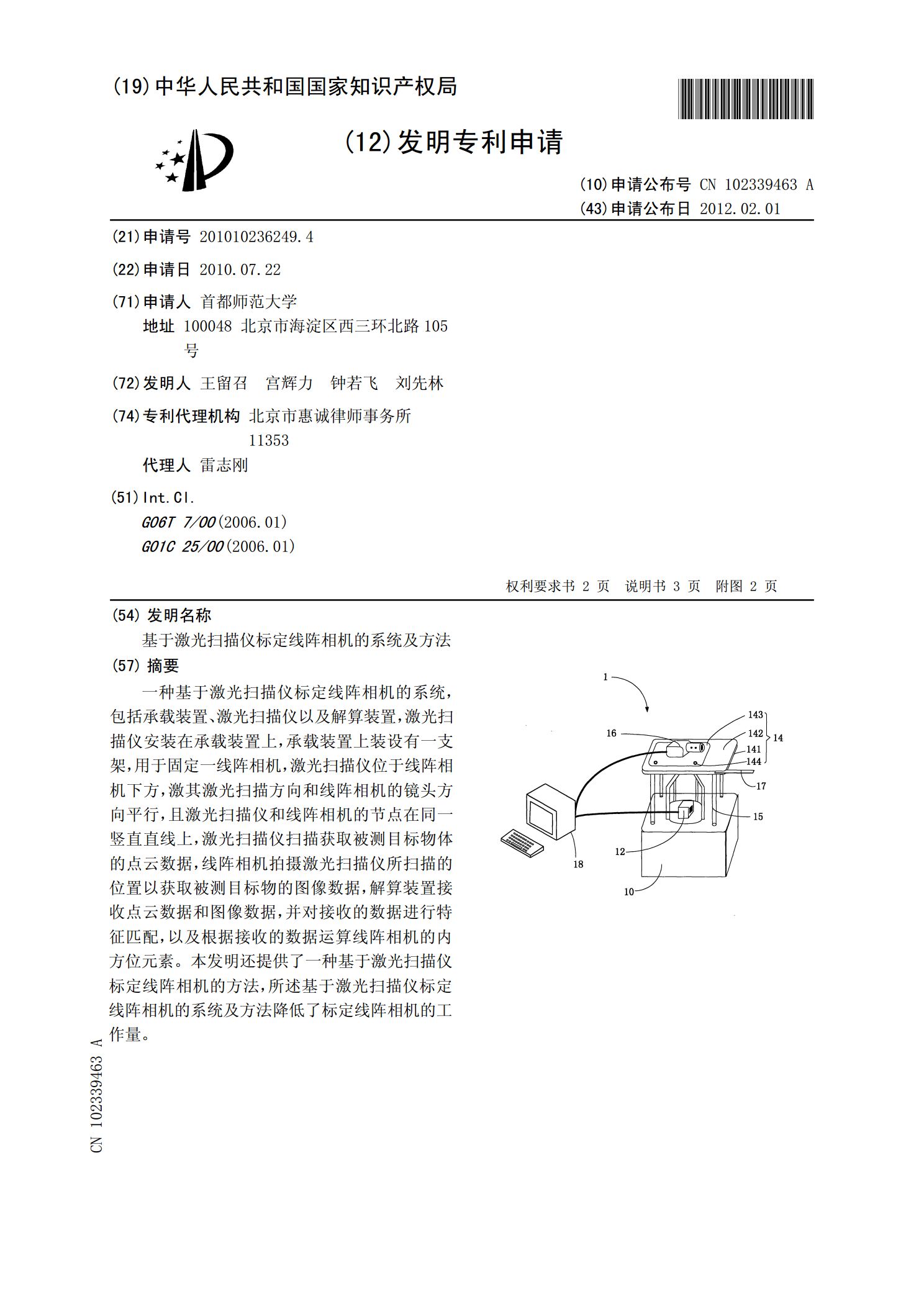
基于激光扫描仪标定线阵相机的系统及方法.pdf
一种基于激光扫描仪标定线阵相机的系统,包括承载装置、激光扫描仪以及解算装置,激光扫描仪安装在承载装置上,承载装置上装设有一支架,用于固定一线阵相机,激光扫描仪位于线阵相机下方,激其激光扫描方向和线阵相机的镜头方向平行,且激光扫描仪和线阵相机的节点在同一竖直直线上,激光扫描仪扫描获取被测目标物体的点云数据,线阵相机拍摄激光扫描仪所扫描的位置以获取被测目标物的图像数据,解算装置接收点云数据和图像数据,并对接收的数据进行特征匹配,以及根据接收的数据运算线阵相机的内方位元素。本发明还提供了一种基于激光扫描仪标定线