
液压爬模自动连续爬升控制技术研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

液压爬模自动连续爬升控制技术研究.docx
液压爬模自动连续爬升控制技术研究液压爬模自动连续爬升控制技术研究摘要:近年来,随着工程机械的快速发展,液压爬模在建筑、交通等领域得到了广泛应用。为了提高爬模操作的效率和安全性,研究液压爬模自动连续爬升控制技术具有重要意义。本文通过分析液压爬模的工作原理和技术特点,剖析现有自动连续爬升控制方案,并提出了一种改进方案,采用了先进的传感器、控制算法和执行器等技术手段,以实现液压爬模的高效自动连续爬升控制。通过实验验证,该方案在提高爬升效率的同时,保证了爬升过程的安全性。关键词:液压爬模;自动控制;连续爬升;改进
一种可多面同步爬升的液压爬模.pdf
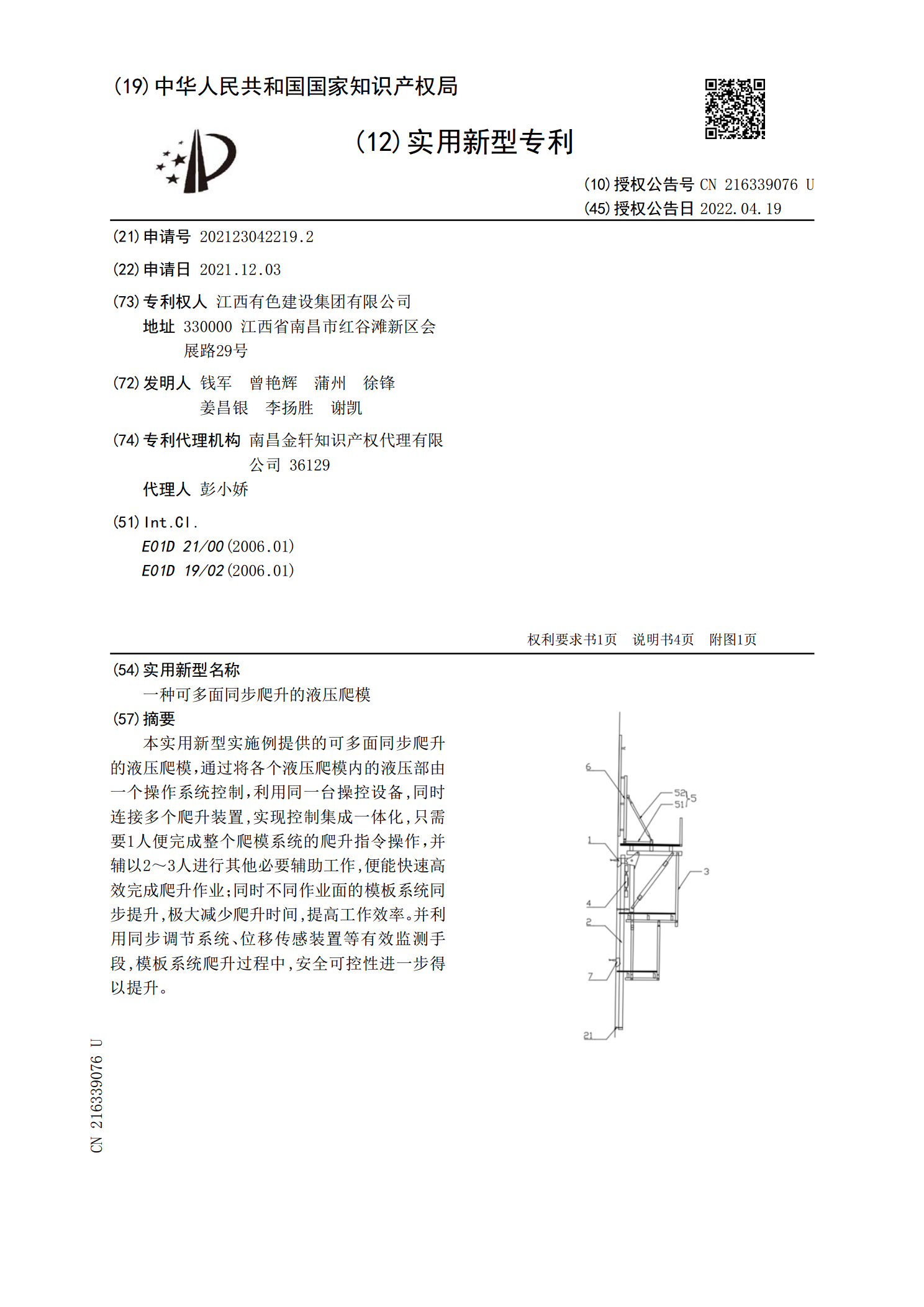
本实用新型实施例提供的可多面同步爬升的液压爬模,通过将各个液压爬模内的液压部由一个操作系统控制,利用同一台操控设备,同时连接多个爬升装置,实现控制集成一体化,只需要1人便完成整个爬模系统的爬升指令操作,并辅以2~3人进行其他必要辅助工作,便能快速高效完成爬升作业;同时不同作业面的模板系统同步提升,极大减少爬升时间,提高工作效率。并利用同步调节系统、位移传感装置等有效监测手段,模板系统爬升过程中,安全可控性进一步得以提升。

液压爬模顶升式混凝土液压布料机滑模连续施工接管装置.pdf
本发明涉及固定建筑施工技术领域,特别是涉及一种液压爬模顶升式混凝土液压布料机滑模连续施工接管装置,其包括上接管和下接管,所述上接管与液压布料机泵管相连通,所述下接管与输送混凝土拖泵的混凝土泵管相连通,所述上接管与所述下接管相配合,所述上接管可相对于所述下接管上下运动。本发明的液压爬模顶升式混凝土液压布料机滑模连续施工接管装置,既可将混凝土泵管固定,又能让液压爬模架和液压布料机各自随意动作,并且爬模顶升机构不会承担整个垂直泵管和水平泵管及管内混凝土所有的重量,爬模不会超载;液压爬模架和液压布料机在混凝土浇筑

液压爬模施工安全控制要点.doc
液压爬模施工安全管路要点2.1爬模特点液压自动爬模工艺融合了滑升模板、大模板施工的已有优点,并具备了施工速度快、操作简洁、工程质量好、成本降低的特点,在我国不少大中型项目中得到广泛应用,如润扬大桥、苏通大桥等.液压爬模施工优点突出体现在:一是表面平整光洁,转角接缝平顺,内外观质量优良,二是操作平台和爬升系统为一体,整体机构紧凑,作业人员操作非常便利;三是爬升装置液压驱动,能实现整体均匀爬升,非常方便、安全。2.2爬模结构液压爬模由大面积模板体系、爬升主体及钢结构工作平台构成,如图1所示。大面积模板通过钢梁

液压爬模施工安全控制要点.doc
(完整word版)液压爬模施工安全控制要点(完整word版)液压爬模施工安全控制要点(完整word版)液压爬模施工安全控制要点液压爬模施工安全管路要点2。1爬模特点液压自动爬模工艺融合了滑升模板、大模板施工的已有优点,并具备了施工速度快、操作简洁、工程质量好、成本降低的特点,在我国不少大中型项目中得到广泛应用,如润扬大桥、苏通大桥等。液压爬模施工优点突出体现在:一是表面平整光洁,转角接缝平顺,内外观质量优良,二是操作平台和爬升系统为一体,整体机构紧凑,作业人员操作非常便利;三是爬升装置液压驱动,能实现整体