
一种旋转体非接触检测信号处理方法.pdf

书生****专家

1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种旋转体非接触检测信号处理方法.pdf
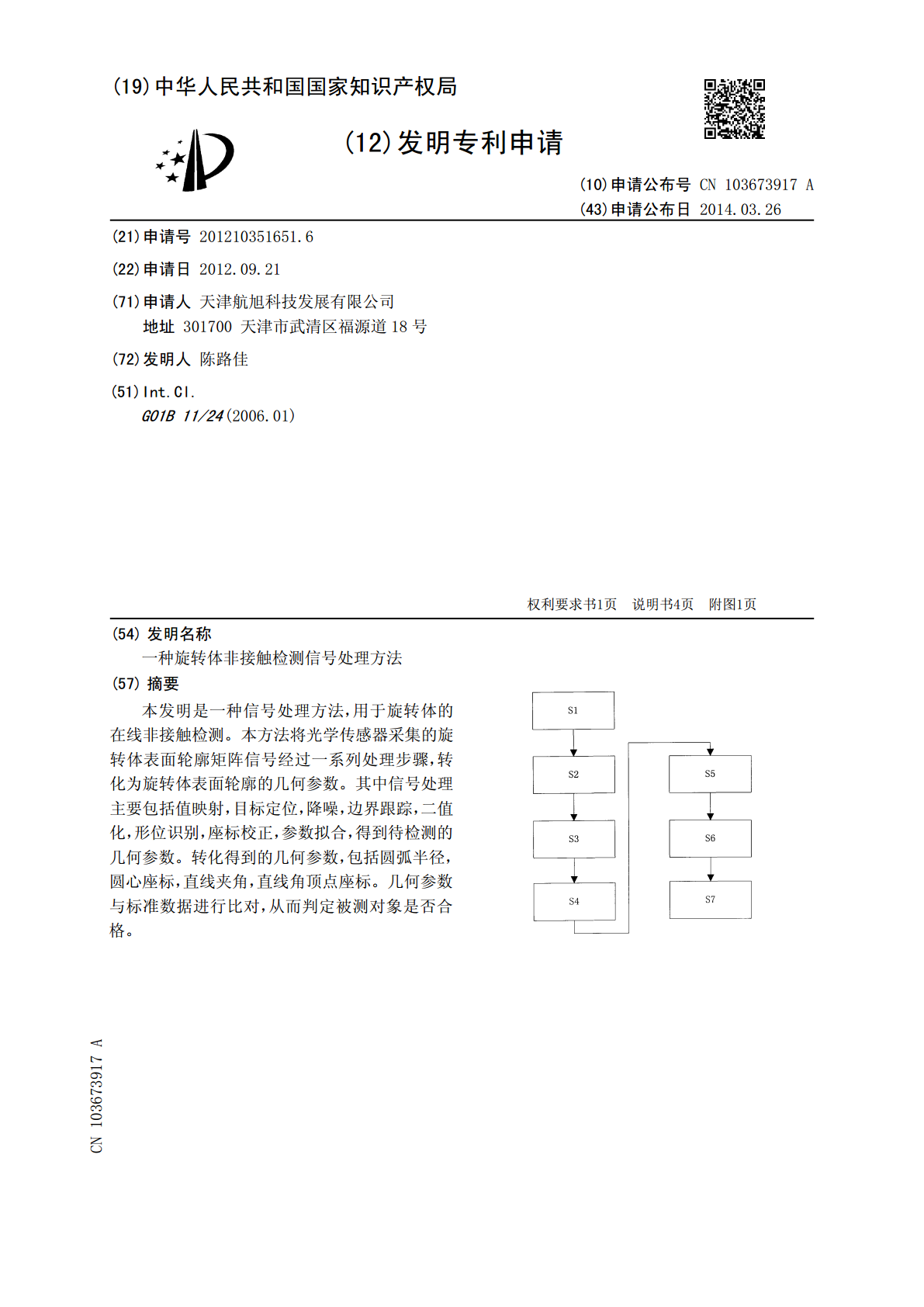
本发明是一种信号处理方法,用于旋转体的在线非接触检测。本方法将光学传感器采集的旋转体表面轮廓矩阵信号经过一系列处理步骤,转化为旋转体表面轮廓的几何参数。其中信号处理主要包括值映射,目标定位,降噪,边界跟踪,二值化,形位识别,座标校正,参数拟合,得到待检测的几何参数。转化得到的几何参数,包括圆弧半径,圆心座标,直线夹角,直线角顶点座标。几何参数与标准数据进行比对,从而判定被测对象是否合格。
一种非接触式生理信号检测方法.pdf
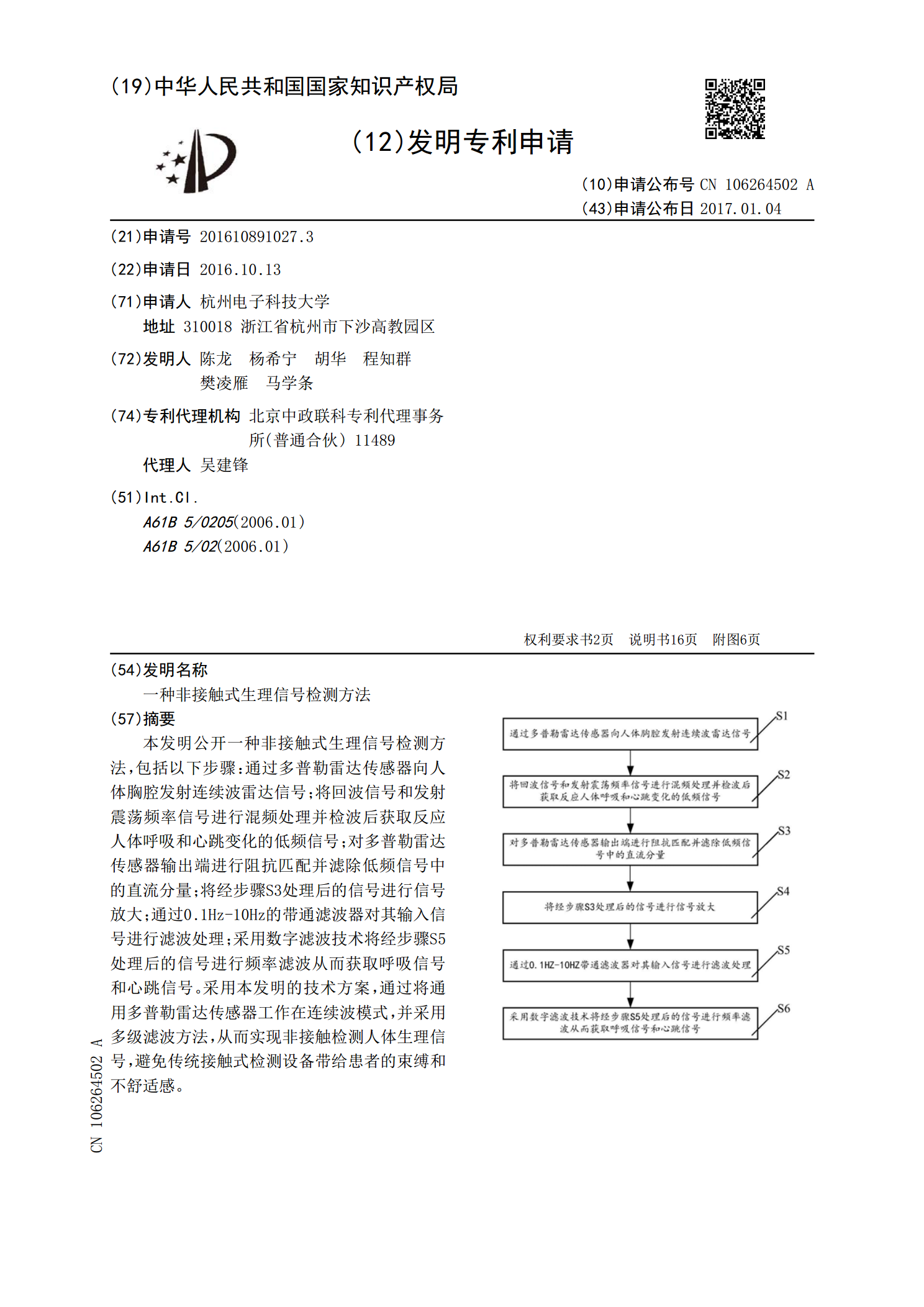
本发明公开一种非接触式生理信号检测方法,包括以下步骤:通过多普勒雷达传感器向人体胸腔发射连续波雷达信号;将回波信号和发射震荡频率信号进行混频处理并检波后获取反应人体呼吸和心跳变化的低频信号;对多普勒雷达传感器输出端进行阻抗匹配并滤除低频信号中的直流分量;将经步骤S3处理后的信号进行信号放大;通过0.1Hz‑10Hz的带通滤波器对其输入信号进行滤波处理;采用数字滤波技术将经步骤S5处理后的信号进行频率滤波从而获取呼吸信号和心跳信号。采用本发明的技术方案,通过将通用多普勒雷达传感器工作在连续波模式,并采用多级
非接触非破坏检查系统、信号处理装置以及非接触非破坏检查方法.pdf
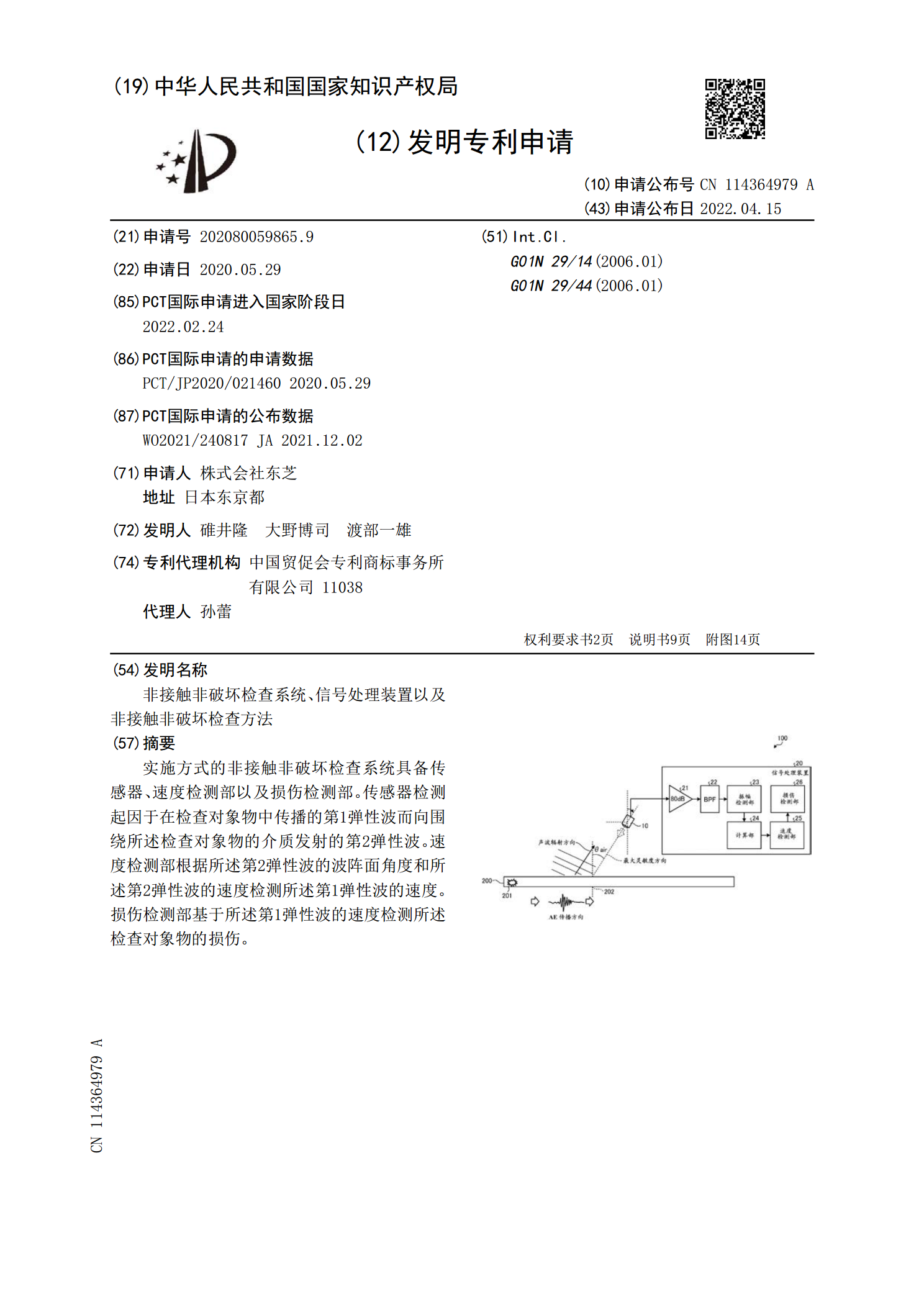
实施方式的非接触非破坏检查系统具备传感器、速度检测部以及损伤检测部。传感器检测起因于在检查对象物中传播的第1弹性波而向围绕所述检查对象物的介质发射的第2弹性波。速度检测部根据所述第2弹性波的波阵面角度和所述第2弹性波的速度检测所述第1弹性波的速度。损伤检测部基于所述第1弹性波的速度检测所述检查对象物的损伤。

LED非接触自动检测系统控制及信号处理的中期报告.docx
LED非接触自动检测系统控制及信号处理的中期报告本项目旨在设计一个LED非接触自动检测系统,用于检测LED灯的亮度和颜色,为LED生产企业提供高效、精确的质量控制手段。本次报告将介绍中期进展,具体包括控制系统设计、信号处理算法开发、实验结果及分析等方面的内容。一、控制系统设计本系统主要包括软件和硬件两大部分。软件部分包括上位机软件、下位机软件和通信协议。上位机负责数据的处理和显示,用于操作下位机,下位机则负责采集数据,控制LED灯的工作状态,并将数据发送至上位机进行处理。通信协议是上位机与下位机之间进行通

非接触式物体探测器信号处理装置.pdf
本发明涉及一种信号处理装置。为克服传统测量受光线、视线角度的限制导致测量误差较大的问题,本发明提供一种非接触式物体探测器信号处理装置,该装置为一电子自动处理装置,其包括:中央处理器单元、电源单元、发射单元、接收单元、输出单元、按键输入单元。该装置利用计数器轮反射光的强弱输出计数脉冲信号,信号处理装置以低功耗微控制器(MCU)为控制核心,结合数字信号处理技术,以低成本实现了对被测物体的高灵敏度检测,并具有较高的可靠性和抗干扰能力。从而解决了传统测量受光线、视线角度的限制导致测量误差较大的问题。