
医用骨钻.pdf

志信****pp


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

医用骨钻.pdf
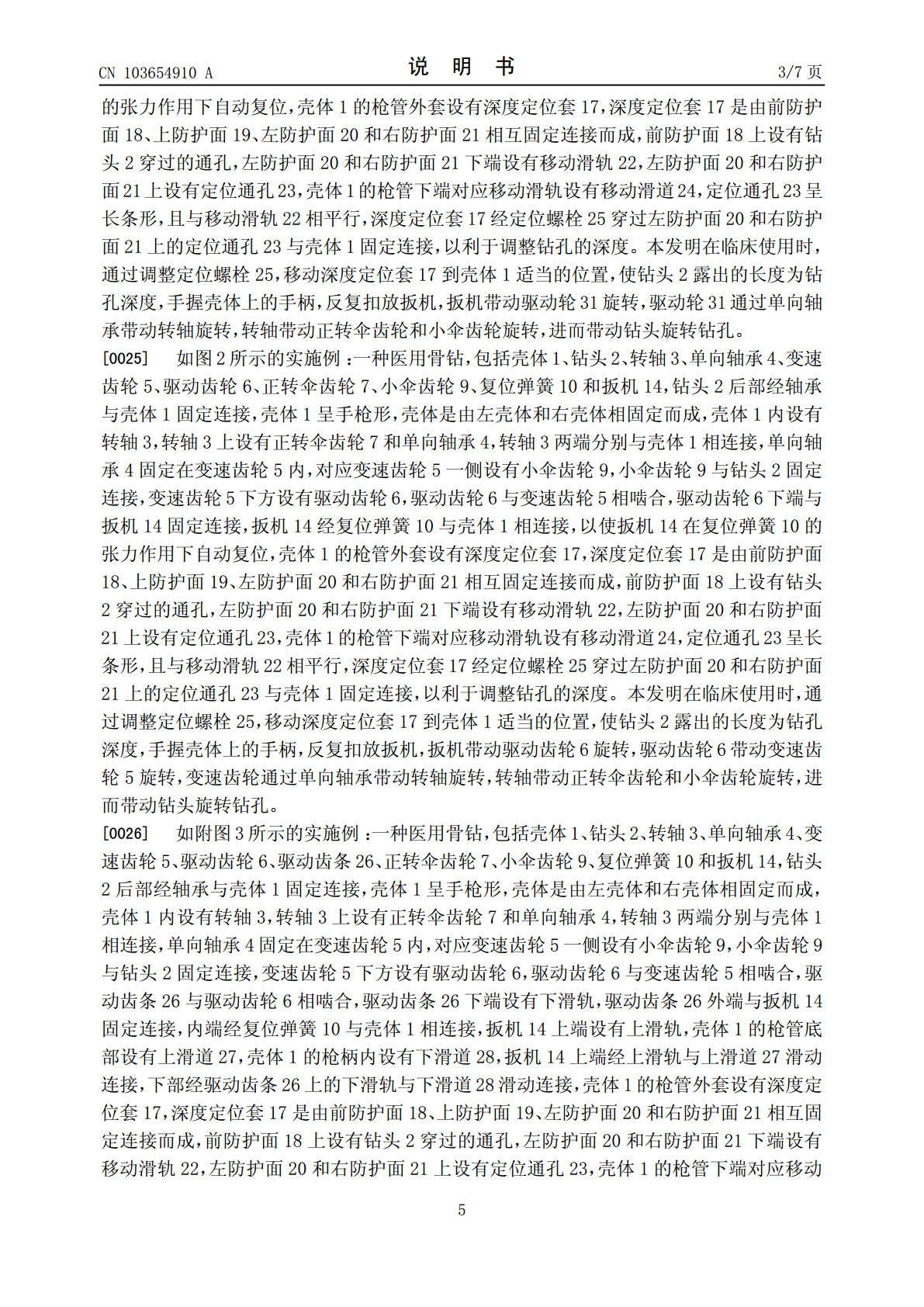
本发明涉及医疗器械技术领域,具体地说是一种医用骨钻,包括壳体和钻头,其特征在于设有转轴、单向轴承、驱动轮、正转伞齿轮、小伞齿轮、复位弹簧和扳机,钻头后部经轴承与壳体固定连接,壳体呈手枪形,壳体内设有转轴,转轴上设有正转伞齿轮和单向轴承,转轴两端分别与壳体相连接,单向轴承固定在驱动轮内,对应驱动轮一侧设有小伞齿轮,小伞齿轮与钻头固定连接,驱动轮下端与扳机固定连接,扳机经复位弹簧与壳体相连接,本发明由于采用上述结构,具有结构简单、转孔速度和深度可控、控制方便、手术时间短、患者痛苦小等优点。
一种医用骨钻.pdf
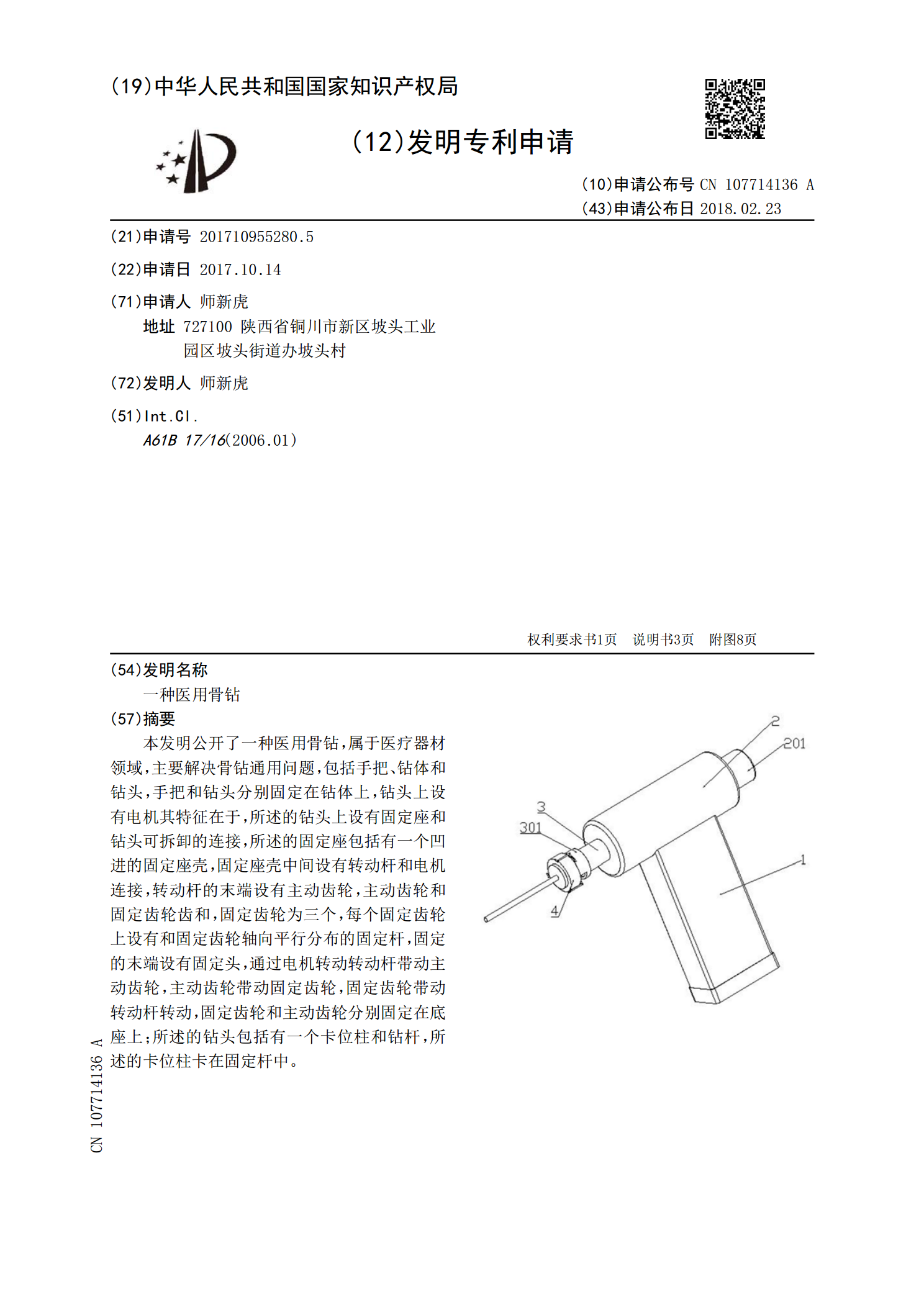
本发明公开了一种医用骨钻,属于医疗器材领域,主要解决骨钻通用问题,包括手把、钻体和钻头,手把和钻头分别固定在钻体上,钻头上设有电机其特征在于,所述的钻头上设有固定座和钻头可拆卸的连接,所述的固定座包括有一个凹进的固定座壳,固定座壳中间设有转动杆和电机连接,转动杆的末端设有主动齿轮,主动齿轮和固定齿轮齿和,固定齿轮为三个,每个固定齿轮上设有和固定齿轮轴向平行分布的固定杆,固定的末端设有固定头,通过电机转动转动杆带动主动齿轮,主动齿轮带动固定齿轮,固定齿轮带动转动杆转动,固定齿轮和主动齿轮分别固定在底座上;所
一种多功能医用骨钻.pdf
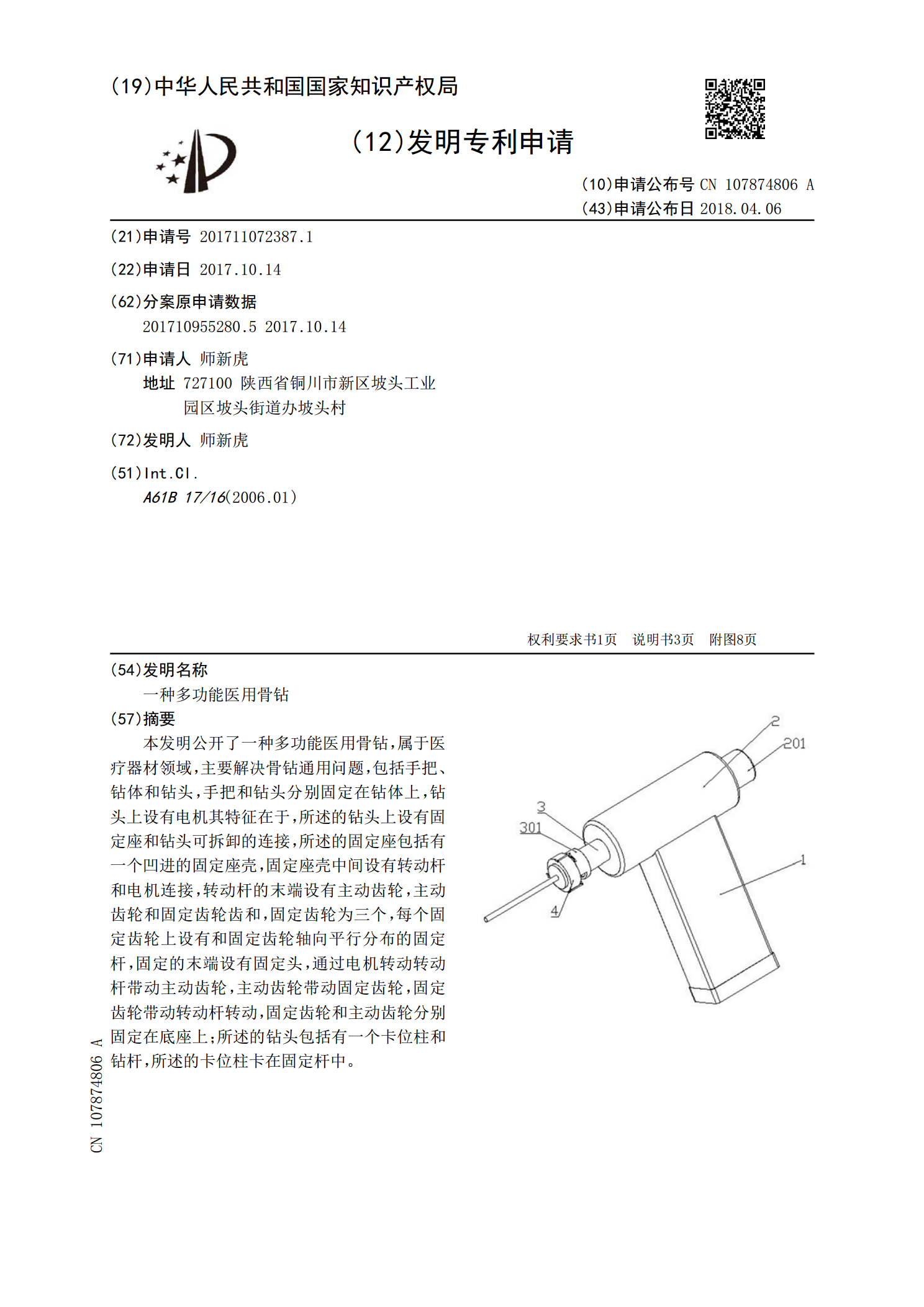
本发明公开了一种多功能医用骨钻,属于医疗器材领域,主要解决骨钻通用问题,包括手把、钻体和钻头,手把和钻头分别固定在钻体上,钻头上设有电机其特征在于,所述的钻头上设有固定座和钻头可拆卸的连接,所述的固定座包括有一个凹进的固定座壳,固定座壳中间设有转动杆和电机连接,转动杆的末端设有主动齿轮,主动齿轮和固定齿轮齿和,固定齿轮为三个,每个固定齿轮上设有和固定齿轮轴向平行分布的固定杆,固定的末端设有固定头,通过电机转动转动杆带动主动齿轮,主动齿轮带动固定齿轮,固定齿轮带动转动杆转动,固定齿轮和主动齿轮分别固定在底座
一种多功能医用骨钻.pdf
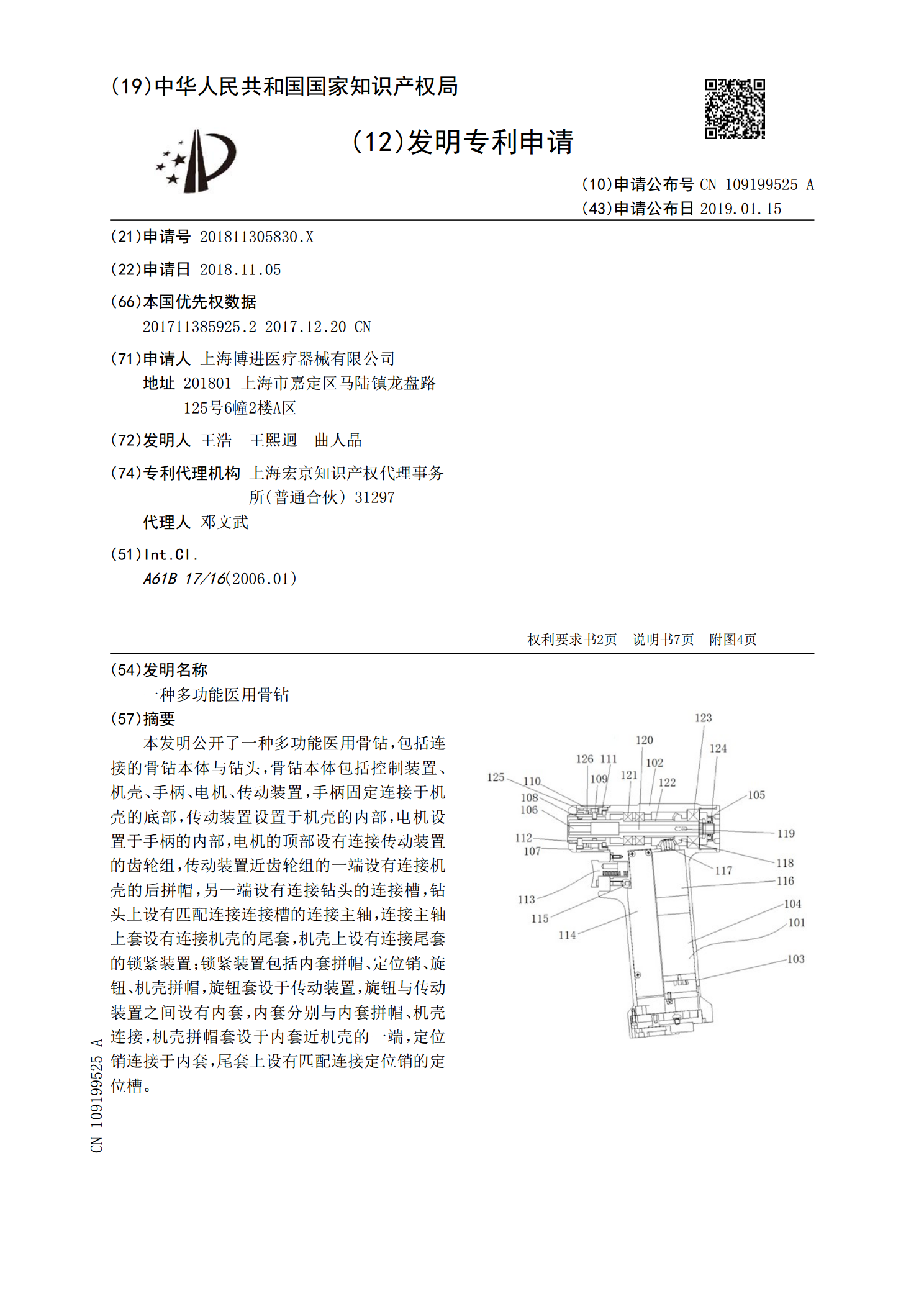
本发明公开了一种多功能医用骨钻,包括连接的骨钻本体与钻头,骨钻本体包括控制装置、机壳、手柄、电机、传动装置,手柄固定连接于机壳的底部,传动装置设置于机壳的内部,电机设置于手柄的内部,电机的顶部设有连接传动装置的齿轮组,传动装置近齿轮组的一端设有连接机壳的后拼帽,另一端设有连接钻头的连接槽,钻头上设有匹配连接连接槽的连接主轴,连接主轴上套设有连接机壳的尾套,机壳上设有连接尾套的锁紧装置;锁紧装置包括内套拼帽、定位销、旋钮、机壳拼帽,旋钮套设于传动装置,旋钮与传动装置之间设有内套,内套分别与内套拼帽、机壳连接
智能骨钻.pdf
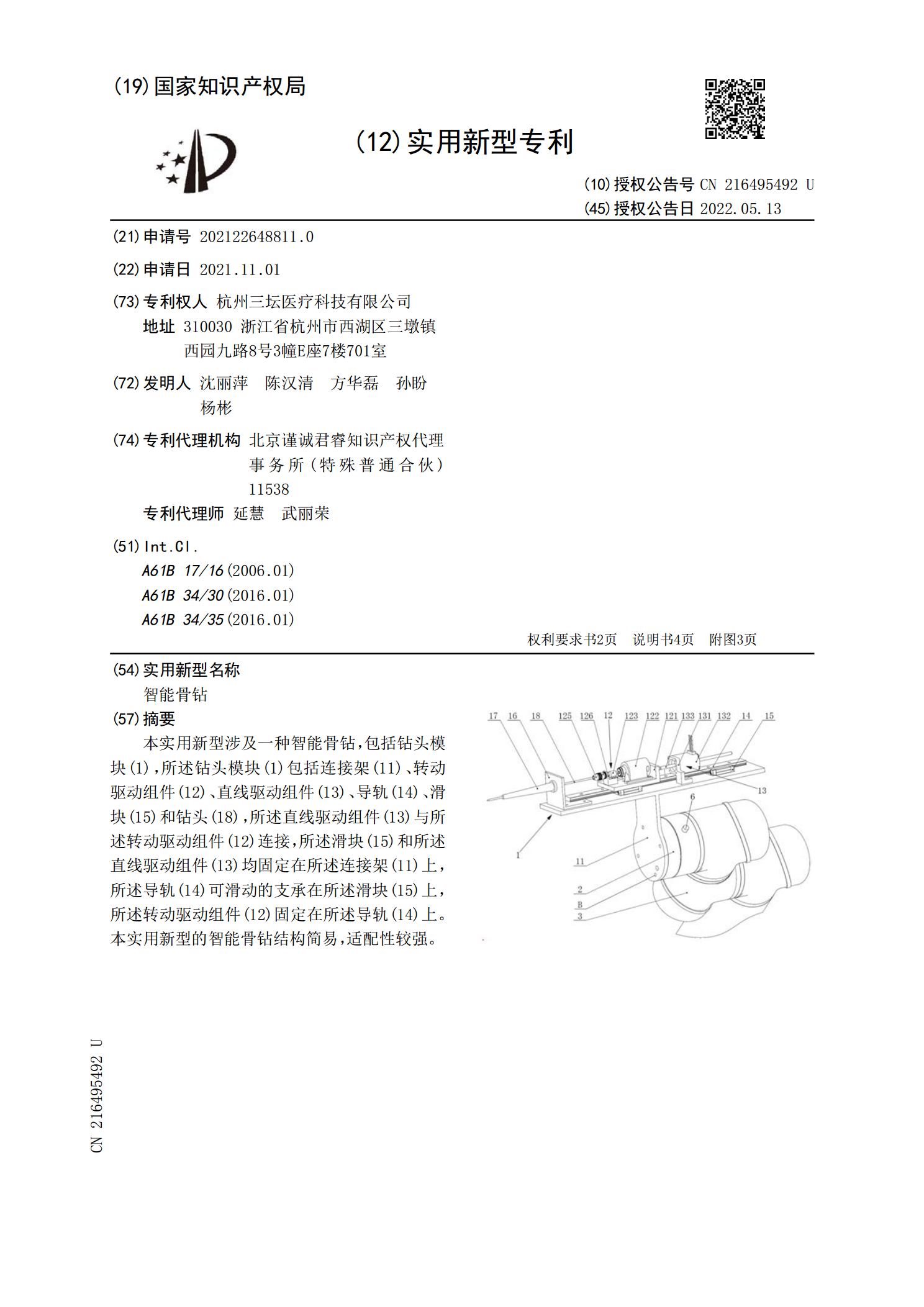
本实用新型涉及一种智能骨钻,包括钻头模块(1),所述钻头模块(1)包括连接架(11)、转动驱动组件(12)、直线驱动组件(13)、导轨(14)、滑块(15)和钻头(18),所述直线驱动组件(13)与所述转动驱动组件(12)连接,所述滑块(15)和所述直线驱动组件(13)均固定在所述连接架(11)上,所述导轨(14)可滑动的支承在所述滑块(15)上,所述转动驱动组件(12)固定在所述导轨(14)上。本实用新型的智能骨钻结构简易,适配性较强。