
多自由度上肢假肢的创新控制方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多自由度上肢假肢的创新控制方法.docx
多自由度上肢假肢的创新控制方法随着科技的不断发展和人们对医疗需求的不断增加,现代假肢技术已经发展到了能够通过神经控制实现人机交互的程度。尤其是在多自由度上肢假肢的控制技术方面,已经出现了多种创新的控制方法,其中不乏利用神经信号感知和模拟技术的创新。本文将着重探讨这些方法的优缺点以及适用的场景。一、基于肌电信号的控制方法肌电信号是指由肌肉收缩时肌肉组织产生的电信号,是控制假肢的一种主流方式。将肌电信号捕捉到的电极与假肢之间建立电学联系,从而将收集到的信号用于实现假肢的控制。这种方法最早于20世纪50年代提出

多自由度上肢假肢的创新控制方法.docx
多自由度上肢假肢的创新控制方法【摘要】文章分析了上肢残肢可实用控制信号源严重不足研究中的神经接口技术没有达到实用推广的的困难问题并论述了一种用于多自由度上肢假肢的多路控制信号源创新方法本方法用于多自由度上肢假肢的多路控制信号源为广大上肢假肢使用者带来了便利适于工业化规模生产与大规模推广应用。本文所述方法已获得作者唯一署名的已授权国家发明专利专利号:ZL201010156003.6在实用中取得了非常良好的效果是上肢假肢技术的新突破。【关键词】上肢假肢;肌电控制;传感器
多自由度上肢假肢的创新控制方法.docx
多自由度上肢假肢的创新控制方法【摘要】文章分析了上肢残肢可实用控制信号源严重不足研究中的神经接口技术没有达到实用推广的的困难问题并论述了一种用于多自由度上肢假肢的多路控制信号源创新方法本方法用于多自由度上肢假肢的多路控制信号源为广大上肢假肢使用者带来了便利适于工业化规模生产与大规模推广应用。本文所述方法已获得作者唯一署名的已授权国家发明专利专利号:ZL201010156003.6在实用中取得了非常良好的效果是上肢假肢技术的新突破。【关键词】上肢假肢;肌电控制;传感器
一种多自由度的上肢假肢.pdf
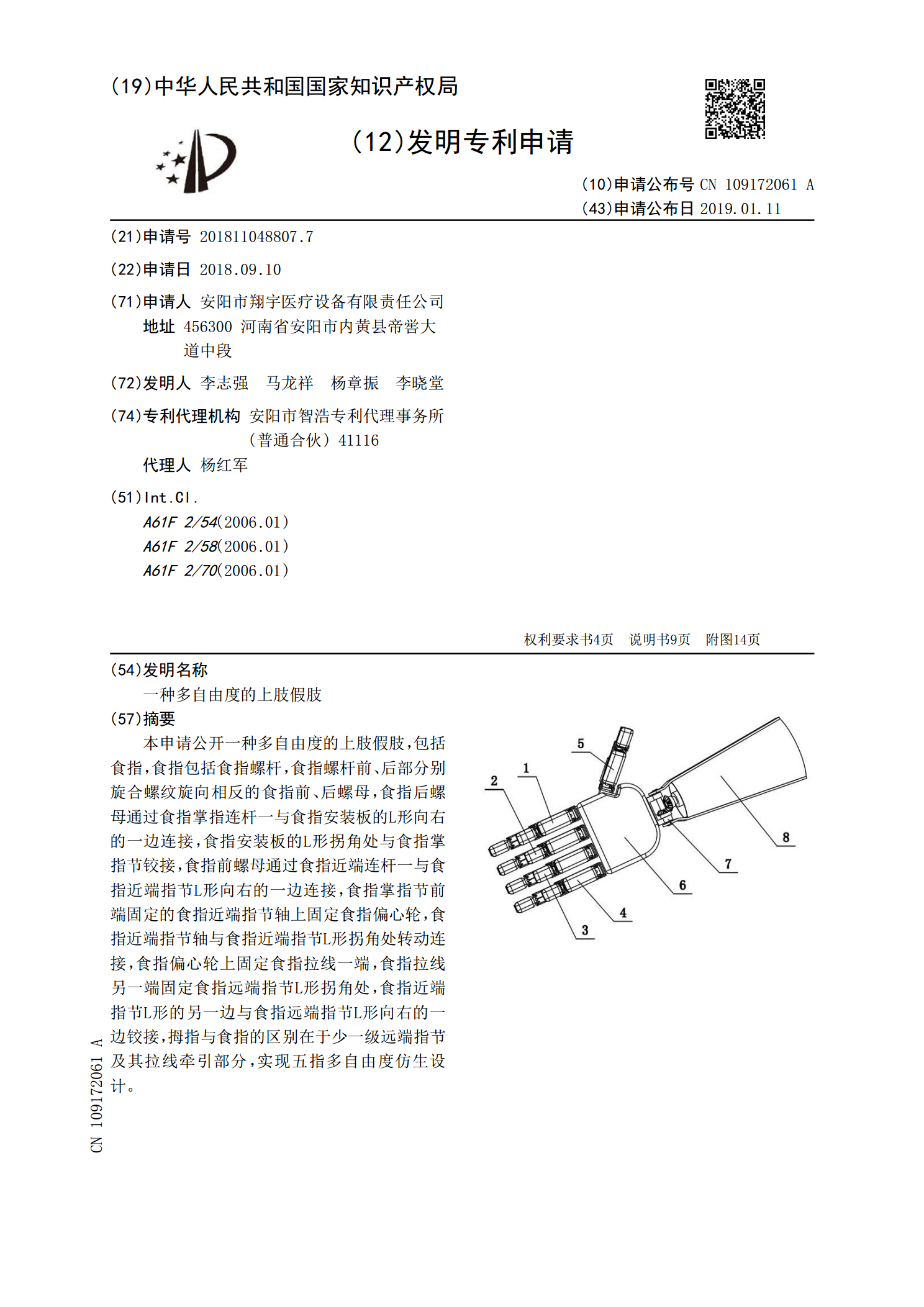
本申请公开一种多自由度的上肢假肢,包括食指,食指包括食指螺杆,食指螺杆前、后部分别旋合螺纹旋向相反的食指前、后螺母,食指后螺母通过食指掌指连杆一与食指安装板的L形向右的一边连接,食指安装板的L形拐角处与食指掌指节铰接,食指前螺母通过食指近端连杆一与食指近端指节L形向右的一边连接,食指掌指节前端固定的食指近端指节轴上固定食指偏心轮,食指近端指节轴与食指近端指节L形拐角处转动连接,食指偏心轮上固定食指拉线一端,食指拉线另一端固定食指远端指节L形拐角处,食指近端指节L形的另一边与食指远端指节L形向右的一边铰接,

基于PSoC的三自由度肌电假肢(上肢)控制系统研究的开题报告.docx
基于PSoC的三自由度肌电假肢(上肢)控制系统研究的开题报告一、研究背景由于各种原因导致的肢体残疾问题在现代社会中仍然严重存在,而这些残疾患者对于上肢的功能恢复需求尤为迫切。目前,肢体残疾患者的主要康复方式是使用机械肢体辅助工具,但是由于机械肢体辅助工具的电机驱动和传动系统存在一定的局限性,其自由度和精度还有待提高,同时机械结构也存在设计难度大、注意力分散等问题。近年来,肌电技术的出现为解决这些问题提供了一个新的思路。肌电信号是指运动肌肉产生的电信号,这种信号可以从肌肉表面记录到,而肌电信号的变化可以反映