
基于能耗优化的六足机器人摆动腿轨迹规划.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于能耗优化的六足机器人摆动腿轨迹规划.docx
基于能耗优化的六足机器人摆动腿轨迹规划摆动腿轨迹规划是六足机器人运动控制中的重要问题之一,它直接影响到机器人形态稳定性和能量消耗情况。针对这个问题,目前各类研究表明能耗优化的方法是一种有效的解决方案。这种方法基于对机器人能量消耗的分析,通过规划前瞻性的轨迹,最大限度地减少机器人空气阻力、惯性、摩擦力和重力等非外力消耗情况,从而实现能耗优化和控制效果提升,从而提高六足机器人的性能指标。下面,本文将阐述基于能耗优化的六足机器人摆动腿轨迹规划的原理、方法、影响因素和典型案例等内容。原理和方法六足机器人摆动腿轨迹
一种规划四足机器人足端摆动轨迹的方法.pdf
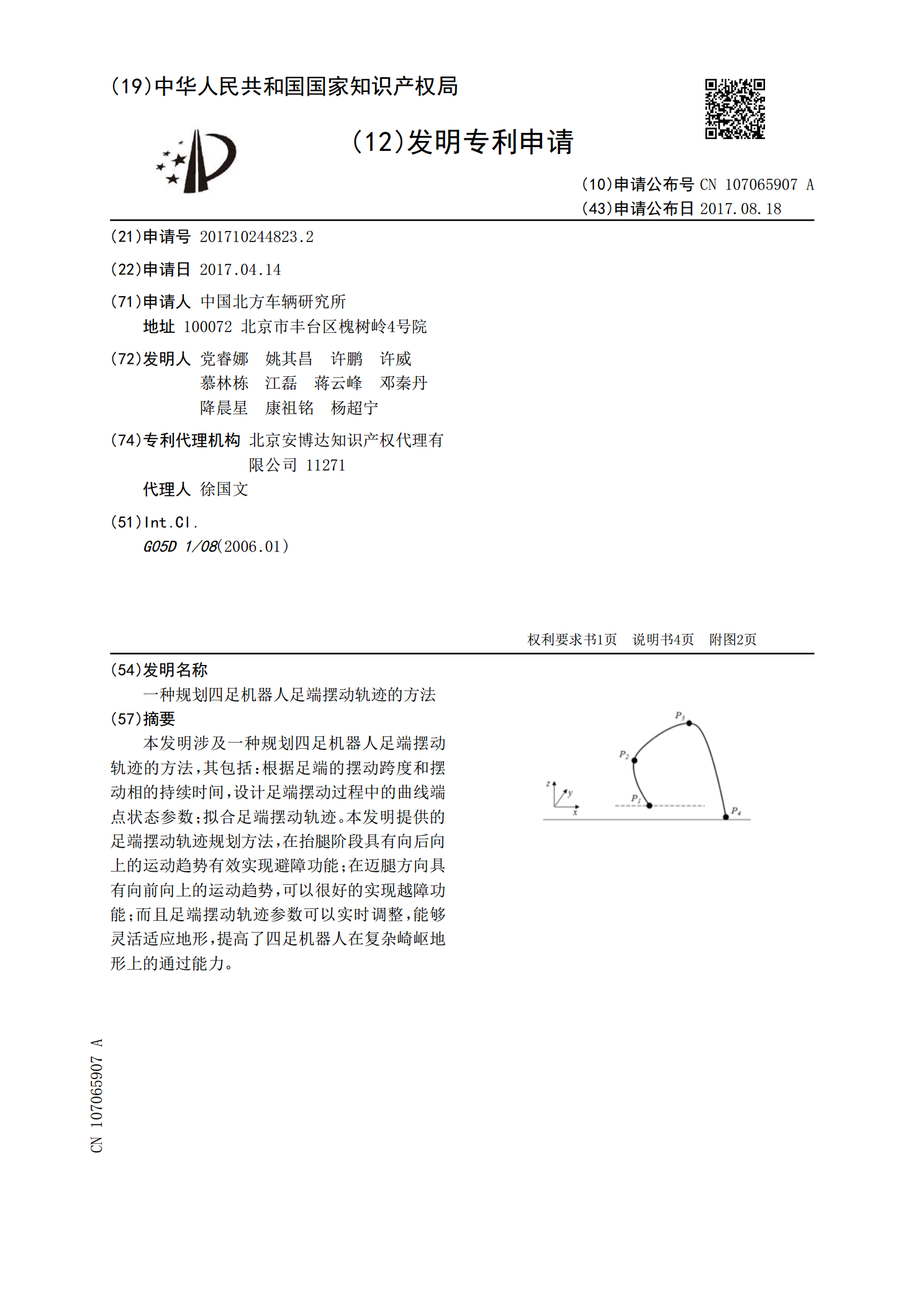
本发明涉及一种规划四足机器人足端摆动轨迹的方法,其包括:根据足端的摆动跨度和摆动相的持续时间,设计足端摆动过程中的曲线端点状态参数;拟合足端摆动轨迹。本发明提供的足端摆动轨迹规划方法,在抬腿阶段具有向后向上的运动趋势有效实现避障功能;在迈腿方向具有向前向上的运动趋势,可以很好的实现越障功能;而且足端摆动轨迹参数可以实时调整,能够灵活适应地形,提高了四足机器人在复杂崎岖地形上的通过能力。

仿生四足机器人单腿轨迹规划研究.docx
仿生四足机器人单腿轨迹规划研究摘要仿生四足机器人的研究已成为机器人领域研究的热点。单腿轨迹规划是仿生四足机器人实现稳定行走的重要构成部分。本文介绍了仿生四足机器人的原理及其单腿的结构,阐述了单腿运动的基本规律,提出了单腿轨迹规划的方法,并通过仿真实验验证了方法的有效性。关键词:仿生四足机器人;单腿轨迹规划;稳定行走;仿真实验。AbstractTheresearchonbionicquadrupedrobotshasbecomeahotspotinthefieldofrobotics.Singlelegtr

基于全局轨迹的六足机器人运动规划算法.docx
基于全局轨迹的六足机器人运动规划算法摘要六足机器人作为一种具有灵活性和适应性的机器人结构,近年来得到了广泛的研究和应用。然而,六足机器人的运动规划问题一直是研究的热点问题。本文提出了一种基于全局轨迹的六足机器人运动规划算法,该算法不仅可以保证机器人的运动安全性,同时可以使六足机器人得到更好的运动性能。关键词:六足机器人;运动规划;全局轨迹;运动安全性;运动性能引言六足机器人作为一种具有灵活性和适应性的机器人结构,可用于各种环境和任务。然而,由于它的机器人结构复杂,控制和运动规划问题成为六足机器人研究和应用

四足轮腿式移动机器人的步态分析及轨迹规划.docx
四足轮腿式移动机器人的步态分析及轨迹规划四足轮腿式移动机器人的步态分析及轨迹规划随着机械工程和电子技术的不断发展,移动机器人在各种领域内得到了广泛的应用,特别是在工业、探测等领域。四足轮腿式移动机器人作为一种具有多种动态性的机器人,受到了广泛的研究。本文主要分析了四足轮腿式移动机器人的步态分析及轨迹规划。一、四足轮腿式移动机器人四足轮腿式移动机器人是一种能够在不同的地形和环境下移动的机器人。与传统的以轮子为基础的机器人不同,它采用了四条腿和四个轮子的结合体,可以在各种复杂环境中自由移动,例如,山地、城市、