
基于线结构光的大尺寸空间角度检测算法设计与实现.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于线结构光的大尺寸空间角度检测算法设计与实现.docx
基于线结构光的大尺寸空间角度检测算法设计与实现本文将基于线结构光的大尺寸空间角度检测算法进行论述和探讨。线结构光是一种3D视觉测量方法,它通过对物体表面进行投影,在摄像机中捕捉到该物体表面的形状和大小等信息。本文将深入阐述线结构光的工作原理,并介绍一种基于线结构光的大尺寸空间角度检测算法的设计与实现方法。一、线结构光的工作原理线结构光是一种非常常见的三维测量方法,它通过在物体表面投射受控制的光条或光片,从而得到该物体表面精准的三维模型。线结构光是在物体表面上留下的一系列光点构成的,通过计算这些点的三维坐标

基于公共光学基准的大尺寸空间角度测量关键技术.docx
基于公共光学基准的大尺寸空间角度测量关键技术摘要随着科技的不断发展,大尺寸空间角度测量技术的需求日益增加,同时也呈现出越来越高的精度和要求。公共光学基准技术可以确保测量结果的稳定性和精度,并且可以适应大尺寸空间环境的测量需求。本文从公共光学基准角度,介绍大尺寸空间角度测量的关键技术,包括光学建标系统、角度测量系统和数据处理与分析等方面,以期为该领域的研究工作者提供参考。关键词:公共光学基准;大尺寸空间角度测量;光学建标系统;角度测量系统;数据处理与分析正文一、绪论角度测量是一门重要的测量技术,在各种领域都

基于公共光学基准的大尺寸空间角度测量误差研究.docx
基于公共光学基准的大尺寸空间角度测量误差研究随着科技的发展,精确测量空间角度成为了许多领域内研究和应用的重要前提。而大尺寸空间角度测量服从的原理就是公共光学基准。本文将围绕这一原理,探讨大尺寸空间角度测量误差的相关研究。首先,为了了解什么是公共光学基准,我们需要明确一些概念。公共光学基准是指将空间测量仪器视轴与基准线(通常为水平方向)垂直,并将视轴与大地水准面交点作为基准点,实现测量的基准。这样可以保证在视轴方向的空间角度测量(俯仰和横轴)的稳定性和精度。在公共光学基准下进行大尺寸空间角度测量时,需要考虑

基于线结构光的钢轨轨形测量系统的设计与实现的综述报告.docx
基于线结构光的钢轨轨形测量系统的设计与实现的综述报告近年来,随着高速铁路建设的不断推进,对于轨道质量的要求也越来越高。钢轨的轨形是铁路极为关键的部分,因为轨道不良的形状对铁路线路的舒适性和安全性都会带来严重的影响。因此,如何实时、准确地测量轨道的轨形变得越来越重要。本文将介绍一种基于线结构光的钢轨轨形测量系统的设计与实现,完整地分为硬件设计和软件设计两部分。1.硬件设计基于线结构光的钢轨轨形测量系统主要由相机、光源、线结构发生器、钢轨支架等部分组成。其中,线结构发生器是整个系统的核心部分,它主要通过投射出
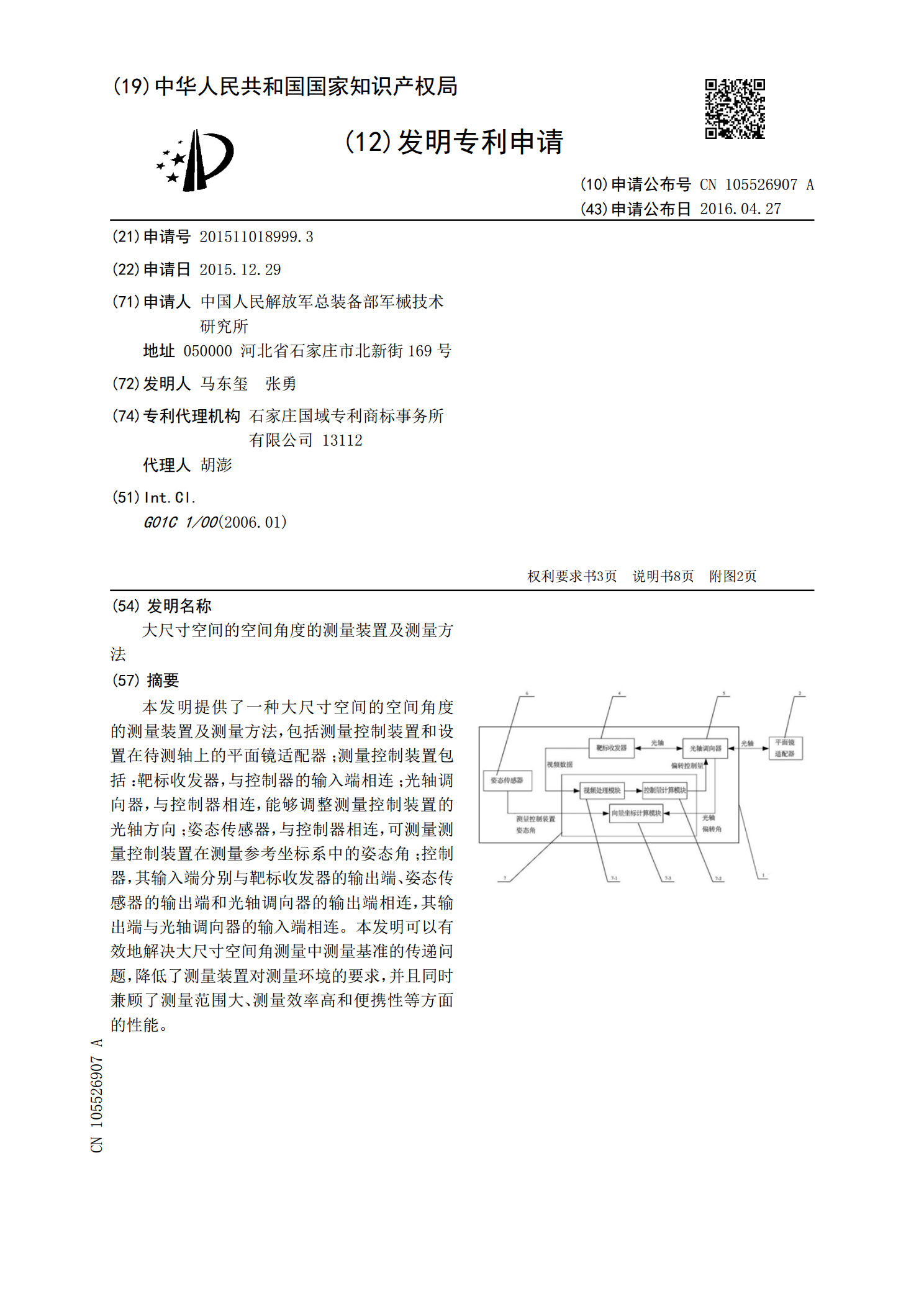
大尺寸空间的空间角度的测量装置及测量方法.pdf
本发明提供了一种大尺寸空间的空间角度的测量装置及测量方法,包括测量控制装置和设置在待测轴上的平面镜适配器;测量控制装置包括:靶标收发器,与控制器的输入端相连;光轴调向器,与控制器相连,能够调整测量控制装置的光轴方向;姿态传感器,与控制器相连,可测量测量控制装置在测量参考坐标系中的姿态角;控制器,其输入端分别与靶标收发器的输出端、姿态传感器的输出端和光轴调向器的输出端相连,其输出端与光轴调向器的输入端相连。本发明可以有效地解决大尺寸空间角测量中测量基准的传递问题,降低了测量装置对测量环境的要求,并且同时兼顾