
基于混杂系统设计的视觉输出轨迹跟踪控制.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于混杂系统设计的视觉输出轨迹跟踪控制.docx
基于混杂系统设计的视觉输出轨迹跟踪控制摘要本文介绍了一种基于混杂系统设计的视觉输出轨迹跟踪控制方法。该方法采用了基于混合系统模型的建模方法,使用模糊系统来进行轨迹跟踪,同时实现了对系统动态性能的控制。通过在MATLAB仿真系统中进行各种实验验证,结果表明,本文所提出的方法具有较高的控制精度和鲁棒性。1.简介视觉输出轨迹跟踪控制是机器视觉中的一项重要研究领域。它主要解决了在机器视觉领域中常见的一个问题,即如何通过机器学习技术,快速准确地识别目标对象并进行输出。目前,视觉输出轨迹跟踪控制技术已经被广泛应用于各

基于输出重定义的非最小相位系统轨迹跟踪控制的开题报告.docx
基于输出重定义的非最小相位系统轨迹跟踪控制的开题报告一、研究背景和意义随着现代控制理论的不断发展,控制系统的性能不断得到了提升。传统的最小相位控制系统具有快速响应和稳定性等优点,但在实际应用中也存在一些局限性,如无法处理非最小相位系统、存在稳态误差等问题。为了克服这些问题,输出重定义技术被广泛应用于非最小相位系统的控制中。输出重定义技术是指通过改变非最小相位系统的输出,并将其作为新的输入进行控制,以实现系统的稳定性和响应速度等性能优化。由于该技术的重要性和应用价值,对于输出重定义技术的研究一直是控制领域的

基于输出重定义的非最小相位系统轨迹跟踪控制的任务书.docx
基于输出重定义的非最小相位系统轨迹跟踪控制的任务书任务书任务名称:基于输出重定义的非最小相位系统轨迹跟踪控制任务背景:随着现代工业的发展,科技水平的提升,现代控制技术在传统工业生产中得到了广泛的应用。而对于非最小相位系统的控制问题,一直是控制领域的一个难点,其复杂性和不确定性使得其控制具有一定的难度。因此,本次任务旨在研究基于输出重定义理论的非最小相位系统轨迹跟踪控制方案,探索非最小相位系统控制技术的发展方向,解决非最小相位系统控制难点。任务目标:1.回顾现有输出重定义理论的研究成果,熟悉输出重定义控制技
基于AGV系统的轨迹跟踪控制方法.pdf
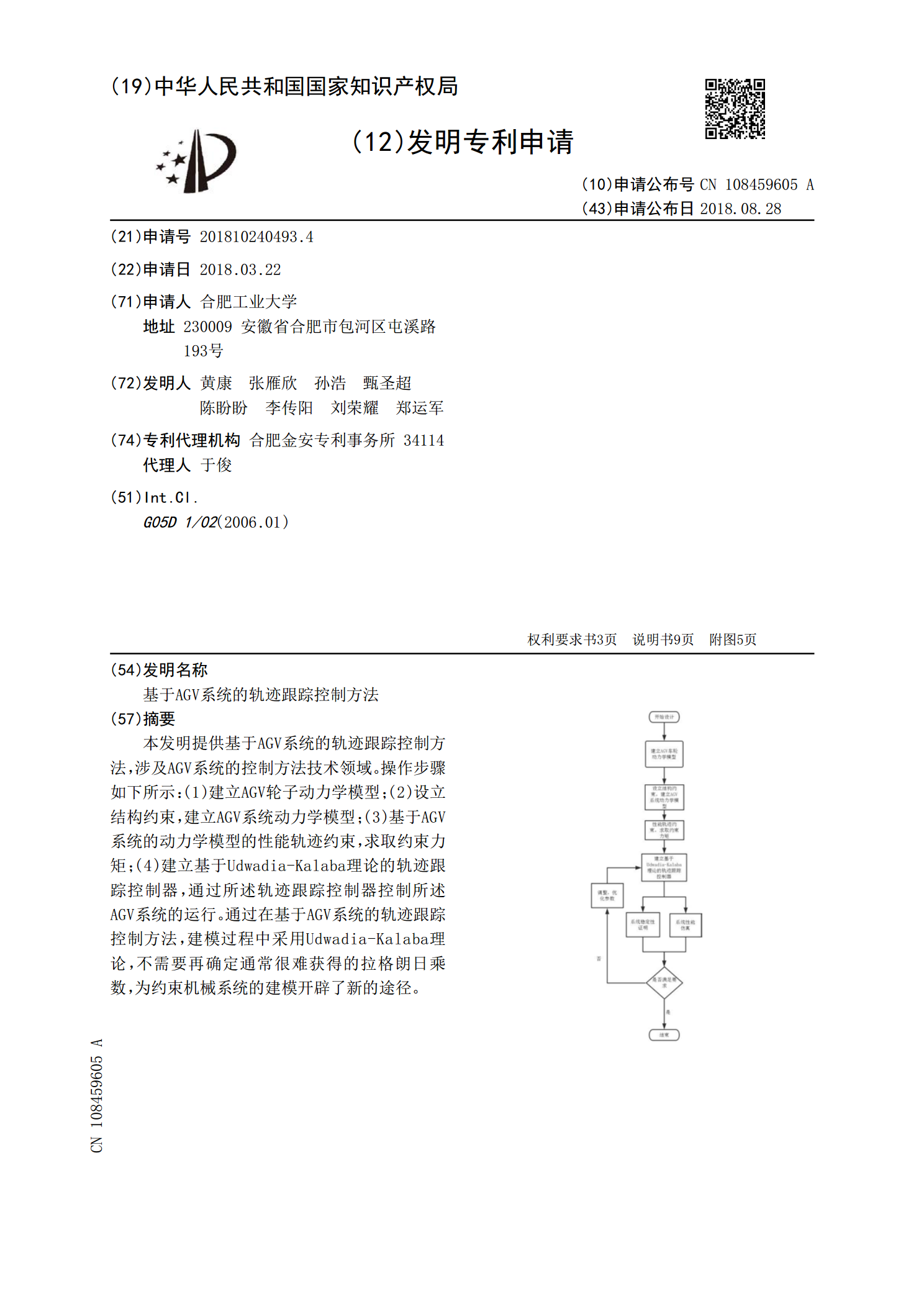
本发明提供基于AGV系统的轨迹跟踪控制方法,涉及AGV系统的控制方法技术领域。操作步骤如下所示:(1)建立AGV轮子动力学模型;(2)设立结构约束,建立AGV系统动力学模型;(3)基于AGV系统的动力学模型的性能轨迹约束,求取约束力矩;(4)建立基于Udwadia‑Kalaba理论的轨迹跟踪控制器,通过所述轨迹跟踪控制器控制所述AGV系统的运行。通过在基于AGV系统的轨迹跟踪控制方法,建模过程中采用Udwadia‑Kalaba理论,不需要再确定通常很难获得的拉格朗日乘数,为约束机械系统的建模开辟了新的途径

基于视觉和后推方法的智能车轨迹跟踪控制.docx
基于视觉和后推方法的智能车轨迹跟踪控制随着智能化技术的不断发展,智能车辆的研究和应用已经成为了当前的热点领域之一。而其中的关键技术之一,就是车辆轨迹跟踪控制技术。本文将介绍一种基于视觉和后推方法的智能车轨迹跟踪控制技术。一、引言汽车轨迹跟踪控制的目标是让车辆按照预定轨迹行驶,对于无人驾驶汽车来说,它是必不可少的一项技术。然而对于智能车来说,由于其自身的特点,轨迹跟踪控制技术会面临着一些具有挑战性的问题,如控制精度、反应速度、车辆稳定性等问题。为了解决这些问题,本文提出了一种基于视觉和后推方法的智能车轨迹跟