
基于惯性冲击的磁致伸缩电机及其运动性能.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于惯性冲击的磁致伸缩电机及其运动性能.docx
基于惯性冲击的磁致伸缩电机及其运动性能摘要磁致伸缩电机是一种新型的驱动系统,该系统基于磁致伸缩效应,具有快速响应,高精度和高效率的特点,被广泛应用于微机电系统,高精度定位和精密制造等领域。本文研究了基于惯性冲击的磁致伸缩电机的运动性能,通过理论分析和实验验证,得到了一些重要结论和改进建议。本文的研究结果对于磁致伸缩电机的进一步发展和应用具有重要的参考价值。关键词:磁致伸缩电机;惯性冲击;运动性能;改进建议引言磁致伸缩电机是一种基于磁致伸缩效应的驱动系统,利用电磁场和材料晶粒定向的变化,产生了微小的位移和应

基于稀土超磁致伸缩材料的惯性冲击式微电机驱动电源的设计.docx
基于稀土超磁致伸缩材料的惯性冲击式微电机驱动电源的设计随着科技的不断进步与人们对微型设备和智能化的需求不断提高,微型电机的发展和应用越来越广泛。惯性冲击式微电机是一种新型的微型电机,具有功耗小、响应速度快、可以控制等优点,在改善现有微电机的动态性能和精度方面有着较大的应用前景。驱动惯性冲击式微电机需要稳定的电源供应,因此,设计一种高效、稳定的驱动电源至关重要。稀土超磁致伸缩材料是一种具有优异磁性和机械性能的新型功能材料,其在微电机驱动电源的设计中有着广泛的应用。本文将从以下几个方面进行探讨:设计惯性冲击式
磁致伸缩式惯性冲击驱动器.pdf
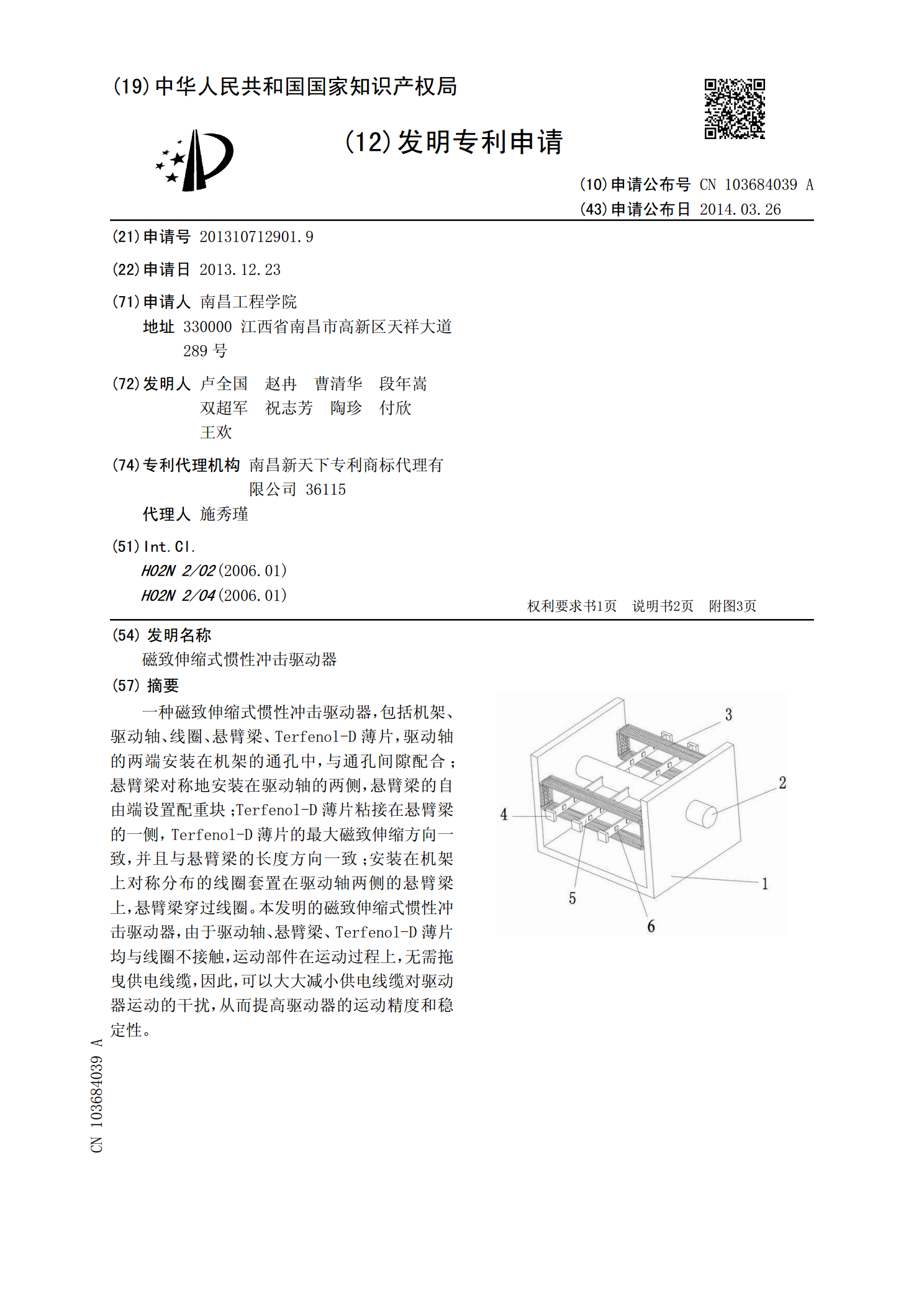
一种磁致伸缩式惯性冲击驱动器,包括机架、驱动轴、线圈、悬臂梁、Terfenol-D薄片,驱动轴的两端安装在机架的通孔中,与通孔间隙配合;悬臂梁对称地安装在驱动轴的两侧,悬臂梁的自由端设置配重块;Terfenol-D薄片粘接在悬臂梁的一侧,Terfenol-D薄片的最大磁致伸缩方向一致,并且与悬臂梁的长度方向一致;安装在机架上对称分布的线圈套置在驱动轴两侧的悬臂梁上,悬臂梁穿过线圈。本发明的磁致伸缩式惯性冲击驱动器,由于驱动轴、悬臂梁、Terfenol-D薄片均与线圈不接触,运动部件在运动过程上,无需拖曳供

基于磁致伸缩材料的电机研究进展.docx
基于磁致伸缩材料的电机研究进展基于磁致伸缩材料的电机研究进展摘要:磁致伸缩材料是一种能够在外加磁场作用下产生形变的材料。在电机领域,磁致伸缩材料被广泛应用于电机驱动和传感器设备。本论文旨在综述基于磁致伸缩材料的电机研究进展,包括其工作原理、应用领域以及未来的发展方向。通过对相关研究文献的综述与分析,我们发现磁致伸缩材料在电机领域具有广阔的应用前景,并为电机研究提供了一种新的思路。一、引言电机是现代工业领域不可或缺的关键设备之一。随着科技的发展,对电机性能和控制能力的要求也越来越高。磁致伸缩材料作为一种新兴

基于负磁致伸缩材料特性的电机降噪方法研究.docx
基于负磁致伸缩材料特性的电机降噪方法研究标题:基于负磁致伸缩材料特性的电机降噪方法研究摘要:随着现代工业的不断发展,电机噪声问题日益凸显,给人们的生产和生活带来了很大困扰。负磁致伸缩材料(NegativeMagnetostrictiveMaterials)作为一种新型材料,在电机降噪领域具有广阔的应用前景。本论文旨在探讨基于负磁致伸缩材料特性的电机降噪方法,从原理分析到实验研究,以期提供更低噪声电机的设计和应用指导。关键词:负磁致伸缩材料、电机降噪、原理分析、实验研究、设计和应用指导第一章:引言1.1研究