
基于改进RRT的路径规划算法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于改进RRT的路径规划算法.docx
基于改进RRT的路径规划算法基于改进RRT的路径规划算法摘要:路径规划是机器人领域中的一个重要问题,其目标是在给定的环境中找到一条从起点到终点的最优路径。传统的路径规划算法在处理复杂环境或高维空间时面临挑战。为了解决这些问题,本文提出了一个基于改进RRT的路径规划算法。该算法通过引入启发式策略和自适应采样方法,有效地提高了路径规划的效率和可行性。实验证明,该算法能够在复杂环境中生成高质量的路径。关键词:路径规划,改进RRT,启发式策略,自适应采样1.引言路径规划是机器人领域中的一项基本任务,广泛应用于无人

基于改进RRT的路径规划算法.pptx
基于改进RRT的路径规划算法目录添加章节标题RRT算法简介RRT算法的基本原理RRT算法的优缺点RRT算法的应用场景改进RRT算法的提出改进RRT算法的背景和意义改进RRT算法的目标和实现方式改进RRT算法的优势和局限性改进RRT算法的实现过程改进RRT算法的步骤和流程改进RRT算法的关键技术改进RRT算法的实验验证和结果分析改进RRT算法的应用案例改进RRT算法在机器人路径规划中的应用改进RRT算法在无人驾驶车辆中的应用改进RRT算法在其他领域的应用和拓展总结与展望对改进RRT算法的总结和评价对未来研究
基于改进RRT算法的AUV路径规划方法.pdf
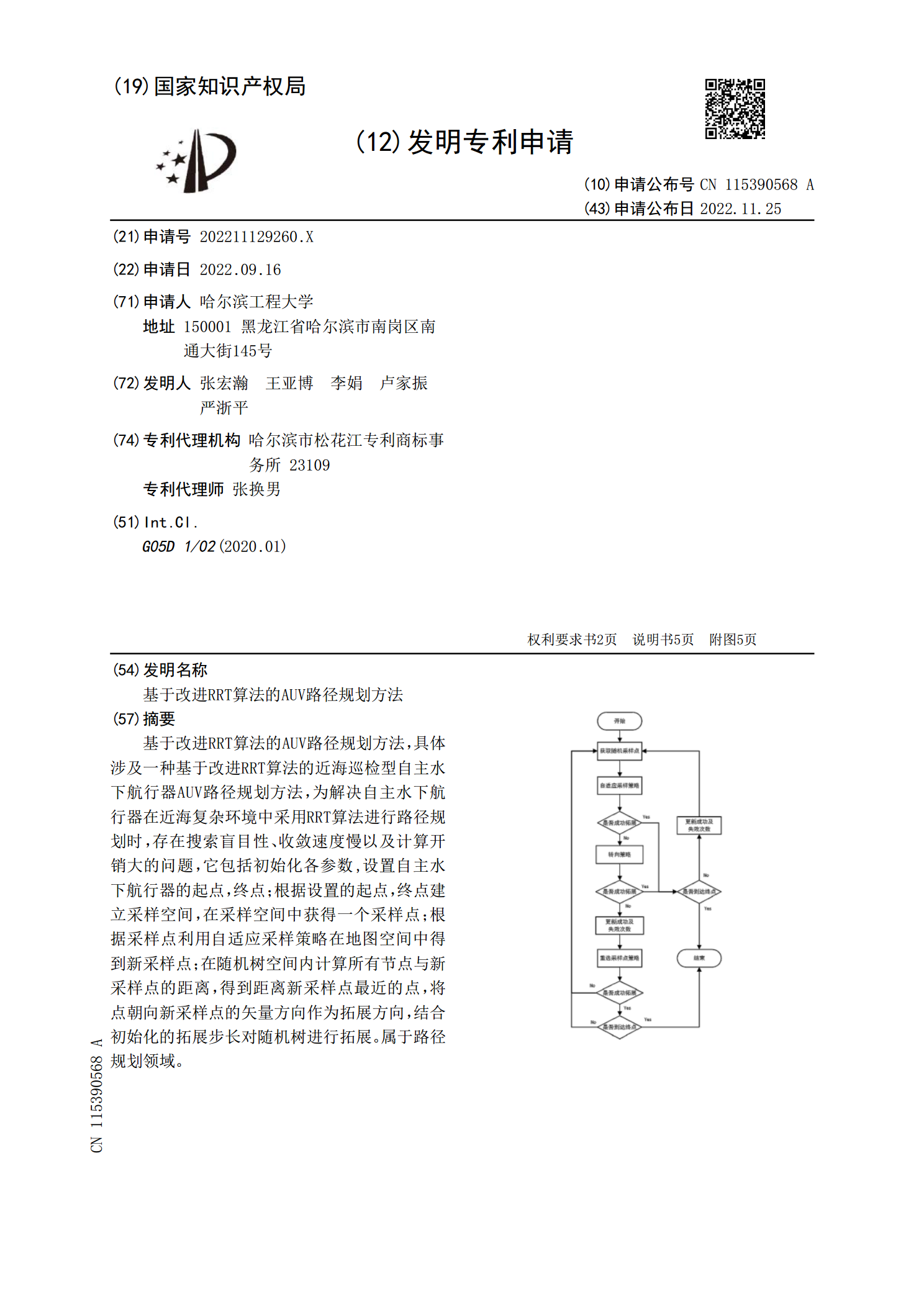
基于改进RRT算法的AUV路径规划方法,具体涉及一种基于改进RRT算法的近海巡检型自主水下航行器AUV路径规划方法,为解决自主水下航行器在近海复杂环境中采用RRT算法进行路径规划时,存在搜索盲目性、收敛速度慢以及计算开销大的问题,它包括初始化各参数,设置自主水下航行器的起点,终点;根据设置的起点,终点建立采样空间,在采样空间中获得一个采样点;根据采样点利用自适应采样策略在地图空间中得到新采样点;在随机树空间内计算所有节点与新采样点的距离,得到距离新采样点最近的点,将点朝向新采样点的矢量方向作为拓展方向,结

基于改进RRT算法的机械臂路径规划研究.docx
基于改进RRT算法的机械臂路径规划研究基于改进RRT算法的机械臂路径规划研究摘要:路径规划是机械臂中一项关键性的任务,它决定了机械臂在三维空间内的轨迹。为了实现高效、快速的路径规划,本文提出了一种基于改进RRT算法的机械臂路径规划方法。首先,介绍了机械臂路径规划的背景和算法原理,然后详细论述了改进RRT算法的设计思路及其优势,最后通过实验验证了该算法在机械臂路径规划中的有效性和高效性。关键词:路径规划、机械臂、RRT算法、改进算法1.引言机械臂(roboticarm)是一种自动化设备,具有高速度、高精度和
基于改进RRT的包裹分拣路径规划算法.pptx
汇报人:CONTENTS添加章节标题算法概述算法定义算法应用场景算法优缺点RRT算法原理RRT算法基本概念RRT算法工作原理RRT算法特点改进RRT算法改进RRT算法的提出背景改进RRT算法的实现方式改进RRT算法的优势与局限性基于改进RRT的包裹分拣路径规划算法流程算法流程图算法步骤说明算法复杂度分析实验结果与分析实验环境与数据集实验结果展示结果分析性能对比分析结论与展望本文工作总结未来研究方向汇报人: