
基于捷联航姿系统挠性陀螺故障诊断方法的研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于捷联航姿系统挠性陀螺故障诊断方法的研究.docx
基于捷联航姿系统挠性陀螺故障诊断方法的研究摘要本文针对捷联航姿系统中挠性陀螺故障问题进行了研究,提出了一种基于信号处理和机器学习的故障诊断方法。首先对挠性陀螺进行了分析,讨论了其工作原理和常见故障;然后介绍了信号处理和机器学习的相关知识,并提出了基于时域模型和频域模型的特征提取方法;最后通过实验对所提出的方法进行了验证,证明了该方法的有效性。关键词:捷联航姿系统;挠性陀螺;故障诊断;信号处理;机器学习。AbstractInthispaper,amethodfordiagnosingflexuralgyro

基于光纤陀螺仪的捷联航姿系统研究与设计的任务书.docx
基于光纤陀螺仪的捷联航姿系统研究与设计的任务书任务书1.研究背景和意义随着空气航空技术的发展,飞行器的性能和安全性成为了更为关注的问题。其中,飞行器的捷联航姿系统是航空器的重要组成部分之一,它可以通过接收姿态、加速度等信息进行控制和稳定,保证飞行器的安全性和舒适性。因此,捷联航姿系统的研究和设计具有重要的实际意义。光纤陀螺仪是目前广泛应用于惯性导航系统、惯性测量和控制系统中的一种惯性测量元件,具有高精度、高稳定性、高速度响应等优点。光纤陀螺仪可以实现对角速度的测量,能够广泛应用于航空、航天、航海及地面测绘

基于MEMS的捷联航姿系统初始对准技术研究.docx
基于MEMS的捷联航姿系统初始对准技术研究摘要MEMS技术在飞行控制中的应用越来越广泛,其中包括捷联航姿系统。捷联航姿系统可以提供飞行器的方向、位置和速度等信息,但需要进行初始对准。本文着重研究基于MEMS的捷联航姿系统初始对准技术,分析其工作原理和算法流程,讨论问题并提出解决方案,最终得到高精度的初始姿态估计结果。实验结果表明,该技术具有高精度、高效率的特点,是一种可靠的初始对准方法。关键词:MEMS、捷联航姿系统、初始对准、姿态估计、飞行控制引言现代飞行器对姿态系统的要求不断提高,因为它可以提供基本的
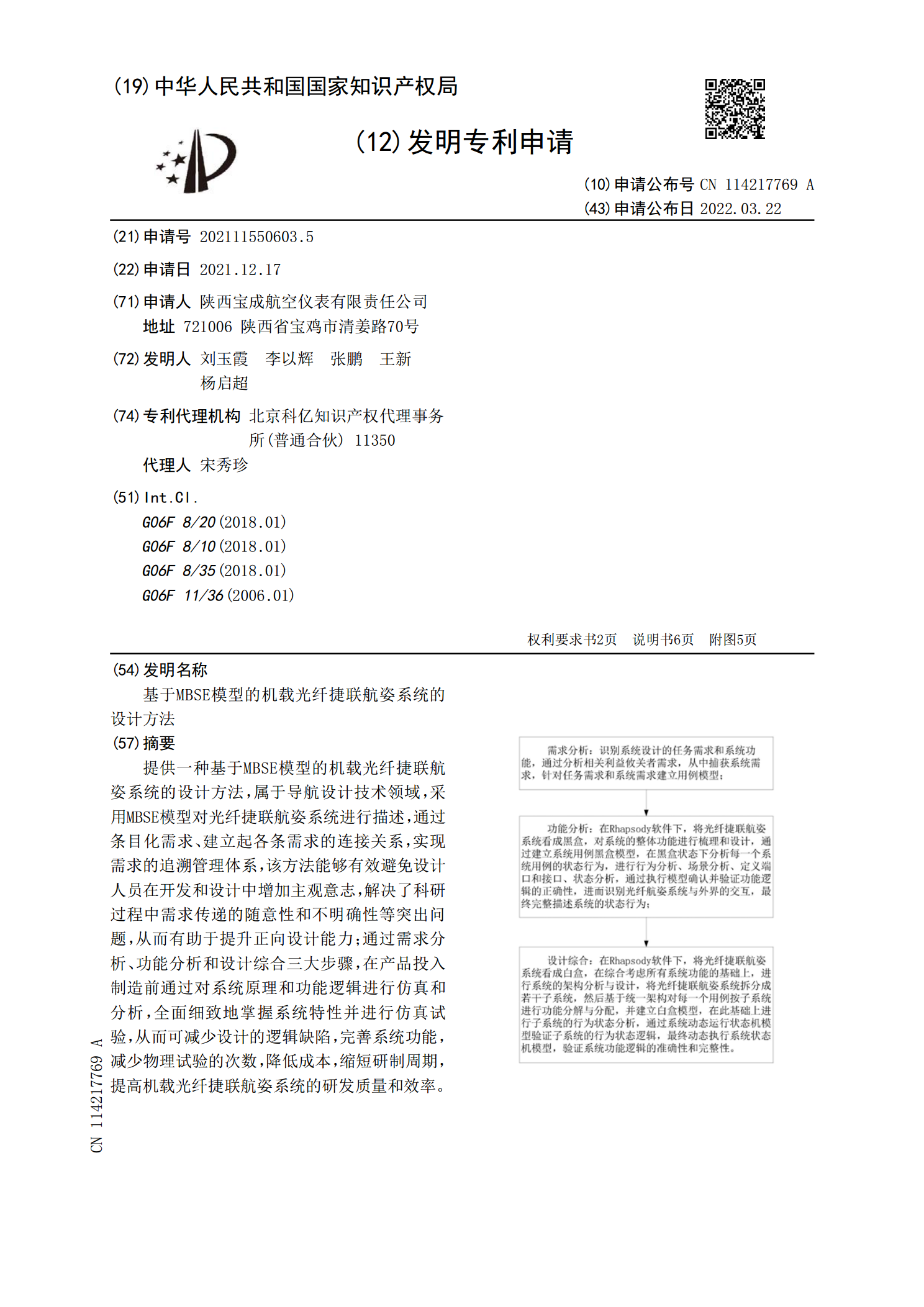
基于MBSE模型的机载光纤捷联航姿系统的设计方法.pdf
提供一种基于MBSE模型的机载光纤捷联航姿系统的设计方法,属于导航设计技术领域,采用MBSE模型对光纤捷联航姿系统进行描述,通过条目化需求、建立起各条需求的连接关系,实现需求的追溯管理体系,该方法能够有效避免设计人员在开发和设计中增加主观意志,解决了科研过程中需求传递的随意性和不明确性等突出问题,从而有助于提升正向设计能力;通过需求分析、功能分析和设计综合三大步骤,在产品投入制造前通过对系统原理和功能逻辑进行仿真和分析,全面细致地掌握系统特性并进行仿真试验,从而可减少设计的逻辑缺陷,完善系统功能,减少物理

光纤陀螺仪建模技术及捷联航姿算法研究的任务书.docx
光纤陀螺仪建模技术及捷联航姿算法研究的任务书任务书一、任务背景作为航空航天等领域中的重要技术之一,航姿控制技术在飞行器的稳定性、控制精度等方面起着至关重要的作用,其中光纤陀螺仪被广泛应用于航姿控制系统中。而光纤陀螺仪建模技术及捷联航姿算法研究是目前该领域中研究难点之一,因此进行相关研究具有重要意义。二、研究内容本研究的主要内容包括光纤陀螺仪建模技术和捷联航姿算法研究两部分,具体内容如下:1.光纤陀螺仪建模技术研究光纤陀螺仪是一种基于光学原理的高精度陀螺仪,广泛应用于各种控制系统中。本研究将着重研究光纤陀螺