
基于数字影像的卫星像片姿态计算系统.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于数字影像的卫星像片姿态计算系统.docx
基于数字影像的卫星像片姿态计算系统标题:基于数字影像的卫星像片姿态计算系统摘要:卫星姿态计算是卫星遥感技术中的重要环节,通过计算卫星相对于地面的姿态信息,可以准确获取地球表面的影像信息。本论文针对基于数字影像的卫星像片姿态计算系统进行研究和设计,旨在提高卫星遥感技术的精度和效率。本文首先介绍卫星姿态计算的背景和意义,然后对数字影像的基本特性进行分析,接着提出卫星像片姿态计算系统的设计方案,并详细讨论系统的关键技术和算法。最后,通过实际数据进行系统验证和性能评估,证明了该系统在卫星影像处理领域的重要性和实用

基于恒星相机的卫星像片姿态测定方法研究.docx
基于恒星相机的卫星像片姿态测定方法研究摘要:本文主要针对基于恒星相机的卫星姿态测量方法进行研究。首先介绍了卫星姿态测量的背景和现状。然后详细阐述了恒星相机的原理和工作流程,并结合实际案例说明了恒星相机在姿态测量中的应用。接着分析了恒星相机在姿态测量过程中可能存在的误差来源,提出了相应的解决方案。最后,总结了该方法的优点和不足,并展望了未来可能的改进方向。关键词:卫星姿态测量、恒星相机、误差来源、解决方案、优点和不足、改进方向。1.引言随着现代卫星技术的不断发展,卫星姿态测量成为了卫星运行控制和任务执行的一

基于恒星相机的卫星像片姿态测定方法研究的任务书.docx
基于恒星相机的卫星像片姿态测定方法研究的任务书一、任务背景随着卫星技术的发展,卫星遥感成像能力越来越强,在国民经济、国土安全、环境保护等领域有广泛的应用。而卫星在运行过程中,由于多种因素的影响,像片的姿态可能会发生变化,这会影响卫星遥感成像精度和卫星任务执行。因此,如何快速、准确地获取卫星像片姿态信息,是卫星遥感技术发展中需要攻克的难题之一。二、任务内容基于恒星相机的卫星像片姿态测定方法研究的任务是以卫星遥感成像技术为基础,利用恒星相机进行卫星像片姿态测定的方法进行深入研究。该任务主要包括以下内容:1.恒

基于星相机的高精度卫星姿态计算.docx
基于星相机的高精度卫星姿态计算基于星相机的高精度卫星姿态计算摘要:卫星姿态是卫星定位和控制中至关重要的参数之一。而传统的姿态测量方法往往受限于测量器件的分辨率、精度和稳定性等因素,难以达到高精度姿态计算的要求。本论文提出了一种基于星相机的卫星姿态计算方法,通过对卫星与星辰之间的相对位置关系进行观测和计算,实现了对卫星姿态的高精度计算。关键词:卫星姿态计算、星相机、高精度、观测、计算1.引言卫星姿态是卫星在太空中的方向和姿态状态,对于卫星的定位、导航和控制具有重要意义。传统的卫星姿态计算方法往往采用陀螺仪、
遥感卫星观测恒星的姿态计算方法及系统.pdf
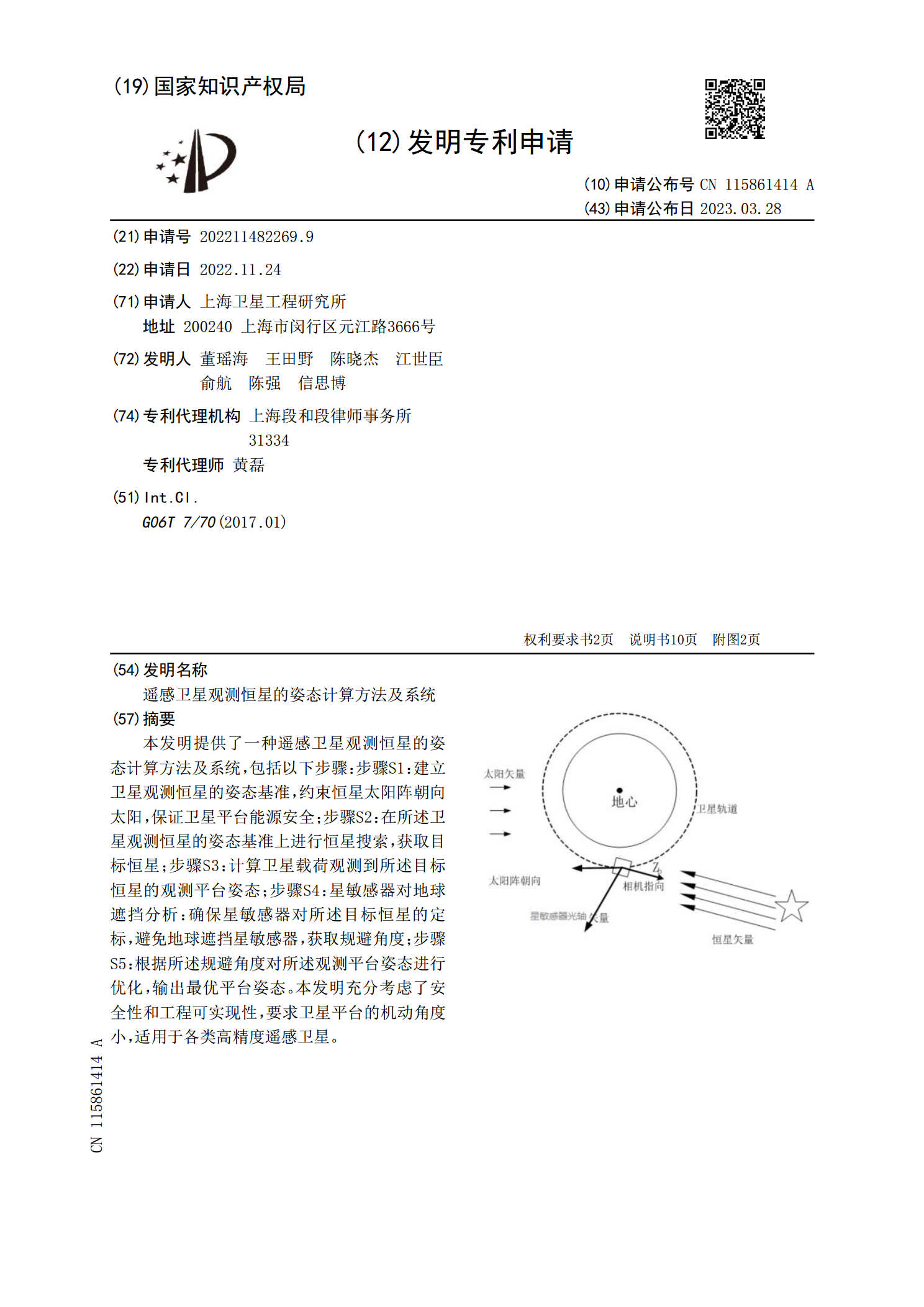
本发明提供了一种遥感卫星观测恒星的姿态计算方法及系统,包括以下步骤:步骤S1:建立卫星观测恒星的姿态基准,约束恒星太阳阵朝向太阳,保证卫星平台能源安全;步骤S2:在所述卫星观测恒星的姿态基准上进行恒星搜索,获取目标恒星;步骤S3:计算卫星载荷观测到所述目标恒星的观测平台姿态;步骤S4:星敏感器对地球遮挡分析:确保星敏感器对所述目标恒星的定标,避免地球遮挡星敏感器,获取规避角度;步骤S5:根据所述规避角度对所述观测平台姿态进行优化,输出最优平台姿态。本发明充分考虑了安全性和工程可实现性,要求卫星平台的机动角