
基于Kinect的机器人控制系统.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Kinect的机器人控制系统.docx
基于Kinect的机器人控制系统随着科技的进步,机器人已经成为人们生活中不可或缺的一部分。机器人的应用范围越来越广泛,包括工业生产、医疗保健、教育、娱乐等领域。而机器人控制是机器人技术研究领域内的关键问题之一,如何让机器人集成更智能、更灵活的控制系统是机器人技术研究的重要课题之一。近年来,适用于人机交互的Kinect技术的出现,为机器人控制系统的设计和实现提供了新的思路和方法。一、Kinect技术简介Kinect是一种由微软研发的体感控制器,可以通过摄像头、红外线发射器和红外线摄像头等设备实时检测人体姿态

基于Kinect的机器人无线体感控制系统.docx
基于Kinect的机器人无线体感控制系统基于Kinect的机器人无线体感控制系统摘要:机器人技术的快速发展使得人们对于机器人控制的需求变得越来越迫切。机器人的体感控制系统是为了提高机器人与人类之间的交互性和操作灵活性而设计的。然而,传统的遥控器和操纵杆等控制方式限制了人机交互的自然性和直观性。为了解决这个问题,本文提出了一种基于Kinect的机器人无线体感控制系统,该系统可以通过人体姿势识别和手势识别来实现机器人的控制,有效地提高了机器人操作的便捷性和人机交互的自然性。关键词:机器人控制,体感控制,Kin

基于Kinect的消防机器人体感控制系统设计研究.docx
基于Kinect的消防机器人体感控制系统设计研究摘要:本文设计了一种基于Kinect的消防机器人体感控制系统,该系统通过Kinect传感器获取环境信息,实现了用户与机器人之间的实时通信。系统采用基于PID控制的运动控制算法,通过对机器人电机控制,实现了机器人前进、后退、左转、右转和加水等基本操作。实验结果表明,该系统可以实时、准确地控制消防机器人在实际环境中进行操作,提高了消防救援效率。关键词:Kinect;消防机器人;体感控制;PID控制Abstract:ThispaperpresentsaKinect

基于Kinect的仿人机器人控制系统的任务书.docx
基于Kinect的仿人机器人控制系统的任务书一、项目背景随着科技的发展和进步,机器人逐渐成为人们生活中的重要助手,而仿人机器人则是机器人研究中的一个热点领域。仿人机器人是指拥有人类行为及语言能力的人形机器人,它可以像人类一样进行语音交互、动作表达等操作。仿人机器人的开发对于未来机器人的发展有着至关重要的意义。本项目旨在开发一款基于Kinect的仿人机器人控制系统,通过Kinect传感器采集用户的动作信息,并与机器人进行交互,实现对仿人机器人的控制。该系统可应用于机器人竞赛、工业自动化、教育培训等领域,具有
基于Kinect的木制机器人.pdf
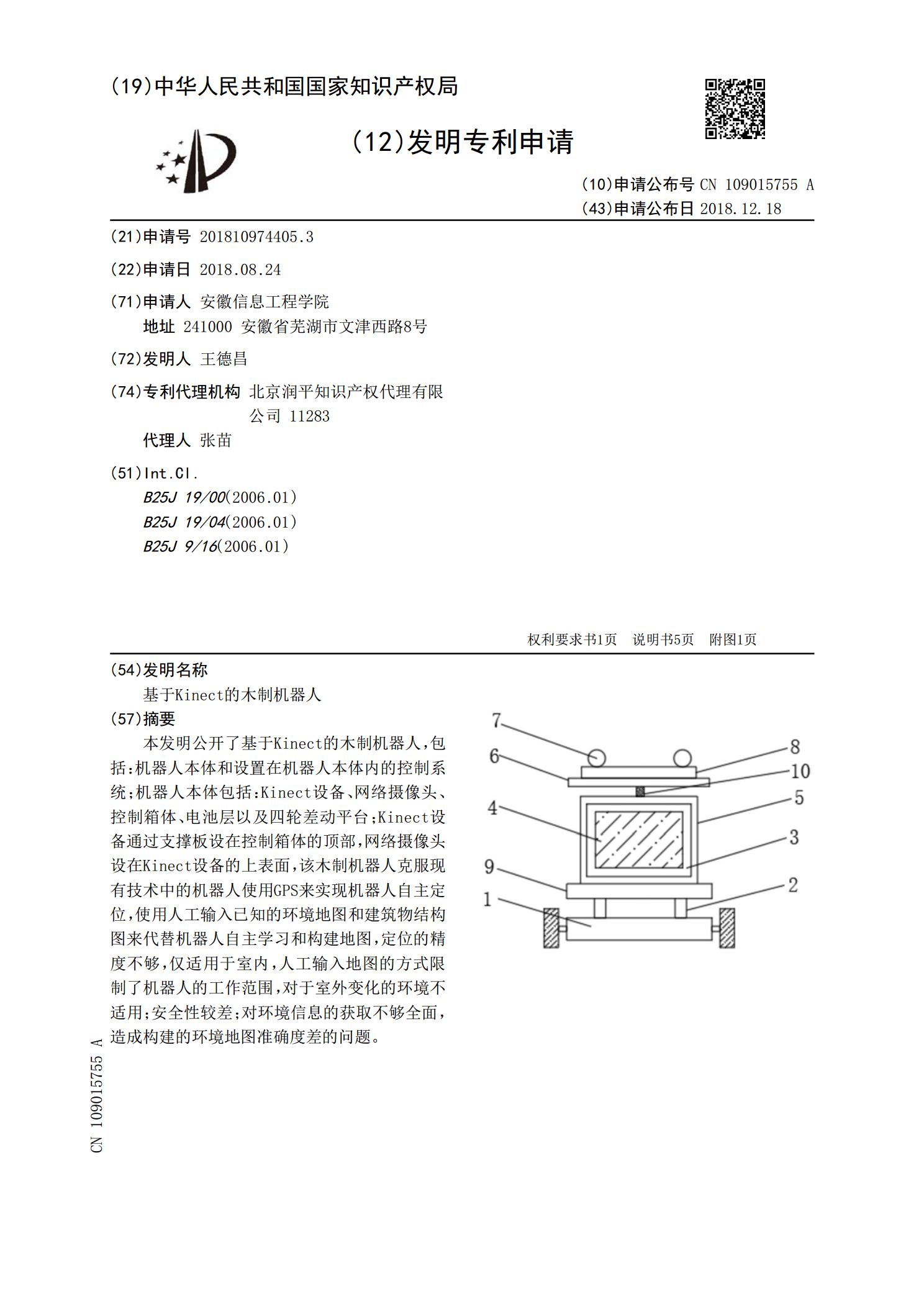
本发明公开了基于Kinect的木制机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;Kinect设备通过支撑板设在控制箱体的顶部,网络摄像头设在Kinect设备的上表面,该木制机器人克服现有技术中的机器人使用GPS来实现机器人自主定位,使用人工输入已知的环境地图和建筑物结构图来代替机器人自主学习和构建地图,定位的精度不够,仅适用于室内,人工输入地图的方式限制了机器人的工作范围,对于室外变化的环境不适用;安全性较差;对环境