
基于Simulink的伺服系统动态性能仿真研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Simulink的伺服系统动态性能仿真研究.docx
基于Simulink的伺服系统动态性能仿真研究摘要:本文在Simulink平台上建立了一个基于PID控制的伺服系统模型,分析了系统的动态性能。通过对模型进行仿真,考察了系统在不同的工况下的性能表现,如稳态误差、响应时间、超调量等参数。研究表明,在优化PID控制器参数的前提下,伺服系统能够获得更加良好的动态性能。关键词:Simulink,伺服系统,PID控制,动态性能1.引言伺服系统是一种通过控制电子机械设备转动来实现自动控制的系统。在工业生产中,广泛应用于机器人、印刷机等自动化设备中。上世纪七八十年代,伺

Simulink的雷达伺服系统动态性能仿真的开题报告.docx
基于Matlab/Simulink的雷达伺服系统动态性能仿真的开题报告题目:基于Matlab/Simulink的雷达伺服系统动态性能仿真一、选题背景随着科技的不断发展,雷达技术日益成熟,已经成为现代军事和民用领域中不可或缺的重要手段。在雷达系统中,伺服系统是雷达控制系统的核心部分,主要负责驱动雷达天线的旋转,实现对目标的搜索和跟踪。因此,伺服系统对雷达系统的性能有着至关重要的影响。目前,人们对雷达伺服系统的仿真研究越来越重视,基于Matlab/Simulink的雷达伺服系统动态性能仿真成为一种常见的方法。
基于Matlab-Simulink的伺服系统仿真.doc
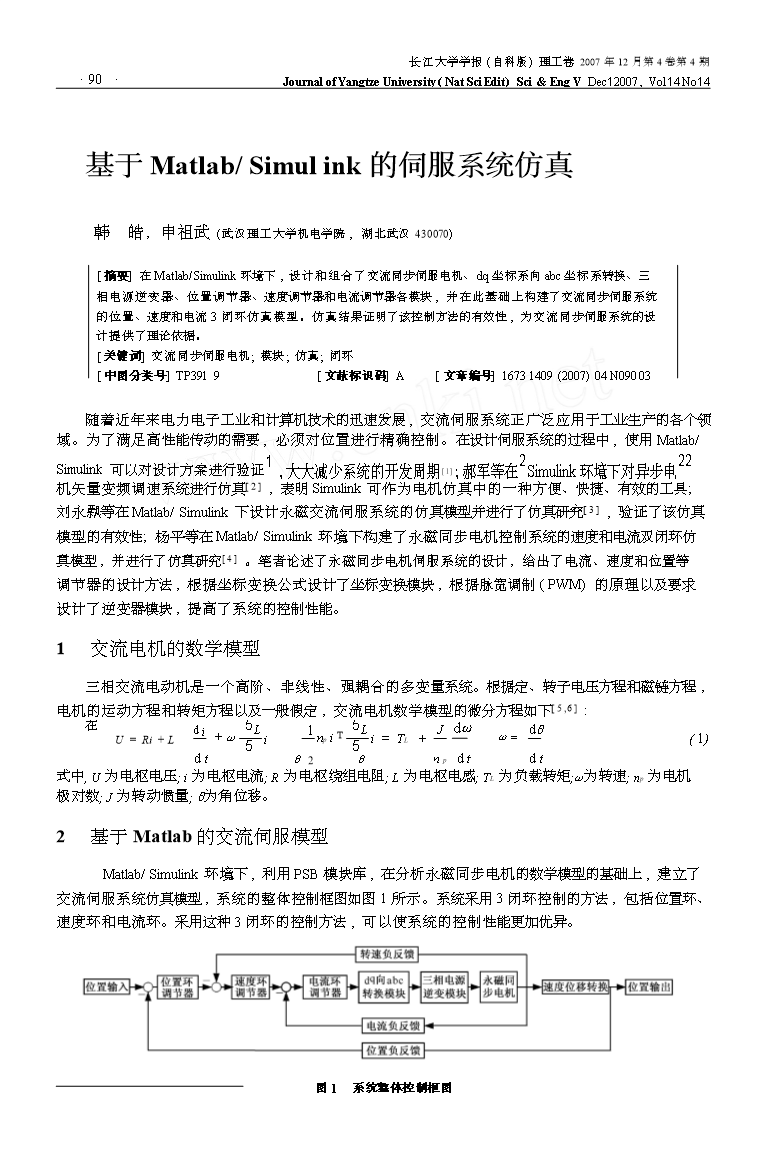
·90·长江大学学报(自科版)理工卷2007年12月第4卷第4期JournalofYangtzeUniversity(NatSciEdit)Sci&EngVDec12007Vol14No14基于Matlab/Simulink的伺服系统仿真韩皓申祖武(武汉理工大学机电学院湖北武汉430070)[摘要]在Matlab/Simulink环境下设计和组合了交流同步伺服电机、dq坐标系向abc坐标
基于Matlab-Simulink的伺服系统仿真.doc
·90·长江大学学报(自科版)理工卷2007年12月第4卷第4期JournalofYangtzeUniversity(NatSciEdit)Sci&EngVDec12007Vol14No14基于Matlab/Simulink的伺服系统仿真韩皓申祖武(武汉理工大学机电学院湖北武汉430070)[摘要]在Matlab/Simulink环境下设计和组合了交流同步伺服电机、dq坐标系向abc坐标
基于Matlab-Simulink的伺服系统仿真.doc
·90·长江大学学报(自科版)理工卷2007年12月第4卷第4期JournalofYangtzeUniversity(NatSciEdit)Sci&EngVDec12007Vol14No14基于Matlab/Simulink的伺服系统仿真韩皓申祖武(武汉理工大学机电学院湖北武汉430070)[摘要]在Matlab/Simulink环境下设计和组合了交流同步伺服电机、dq坐标系向abc坐标