
基于UKF的机器人末端执行器位姿实时估算方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于UKF的机器人末端执行器位姿实时估算方法.docx
基于UKF的机器人末端执行器位姿实时估算方法摘要本文提出了一种基于无迹卡尔曼滤波(UKF)的机器人末端执行器位姿实时估算方法。首先介绍了机器人末端执行器的重要性以及实时位姿估算的必要性;接着详细阐述了UKF的原理以及其在机器人位姿估算中的应用;最后,通过仿真实验验证了该方法的有效性和实用性。关键词:无迹卡尔曼滤波(UKF),机器人末端执行器,位姿估算,实时。AbstractThispaperproposesareal-timeposeestimationmethodforrobotendeffectorb
机器人末端工具的位姿测量方法.pdf
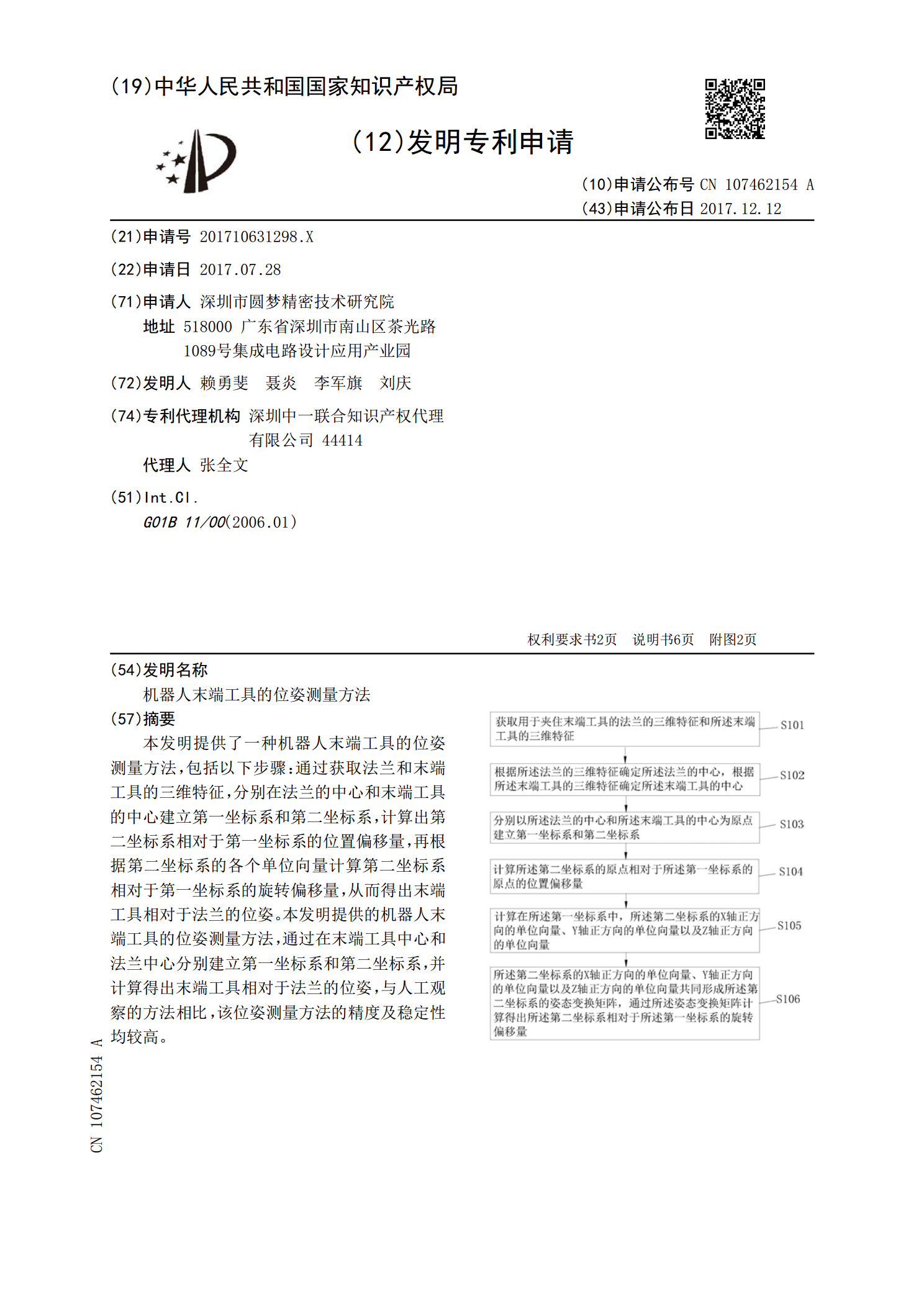
本发明提供了一种机器人末端工具的位姿测量方法,包括以下步骤:通过获取法兰和末端工具的三维特征,分别在法兰的中心和末端工具的中心建立第一坐标系和第二坐标系,计算出第二坐标系相对于第一坐标系的位置偏移量,再根据第二坐标系的各个单位向量计算第二坐标系相对于第一坐标系的旋转偏移量,从而得出末端工具相对于法兰的位姿。本发明提供的机器人末端工具的位姿测量方法,通过在末端工具中心和法兰中心分别建立第一坐标系和第二坐标系,并计算得出末端工具相对于法兰的位姿,与人工观察的方法相比,该位姿测量方法的精度及稳定性均较高。

并联机器人视觉盲区末端位姿检测方法.docx
并联机器人视觉盲区末端位姿检测方法1.引言随着机器人技术的快速发展,机器人系统在工业制造、服务行业及医疗领域中得到了广泛的应用。机器人视觉技术是机器人技术中关键的一部分,它可以实现智能感知、定位识别和场景分析等功能,从而提高机器人的自主性和智能化水平。但是,机器人视觉技术也存在着挑战和难题,其中机器人视觉盲区问题是机器人视觉技术中一个重要的问题。在机器人的操作过程中,机器人所部分无法到达的区域称为盲区,在机器人视觉检测中,这个问题更加突出。为了解决机器人视觉盲区问题,在本文中,提出了一种并联机器人视觉盲区

基于机器视觉的工件位姿估算方法研究.docx
基于机器视觉的工件位姿估算方法研究摘要:在工业领域中,工件位姿的准确估算对于自动化生产线的有效运行非常重要。本文主要研究了基于机器视觉的工件位姿估算方法。首先,介绍了工件位姿估算的定义和重要性。接着,分析了传统工件位姿估算方法的优缺点,然后详细阐述了基于机器视觉的工件位姿估算方法的原理与步骤,并且概述了该方法在实际应用中的表现。最后,总结了该方法的优点和不足,并提出了未来的研究方向。关键词:工件位姿;机器视觉;估算方法;优缺点;实际应用1.研究背景在自动化生产线中,机器人往往需要对工件进行操作,例如抓取、

基于UKF自主定姿方法研究.docx
基于UKF自主定姿方法研究摘要随着现代科技的不断发展,无人机已被应用于许多领域,例如农业、消防和搜索等。在无人机应用过程中,自主定位和定姿是无人机任务中非常重要的部分,具有极高的实际意义。本文介绍了一种基于无迹卡尔曼滤波(UKF)的自主定姿方法,并在MATLAB环境下进行了仿真实验。最终结果证明了该方法的有效性和准确性。关键词:无人机;自主定位;自主定姿;UKF滤波AbstractWiththecontinuousdevelopmentofmoderntechnology,unmannedaerialve