
基于RANSAC算法的三轴磁通门传感器误差校正.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于RANSAC算法的三轴磁通门传感器误差校正.docx
基于RANSAC算法的三轴磁通门传感器误差校正基于RANSAC算法的三轴磁通门传感器误差校正摘要:三轴磁通门传感器是一种常用于测量磁场强度的传感器,但其在实际应用中常常存在误差。本文提出了一种基于RANSAC算法的三轴磁通门传感器误差校正方法。通过采集传感器在不同位置的数据,并利用RANSAC算法对这些数据进行拟合,可以有效地消除传感器误差,提高磁场测量的准确性和稳定性。实验结果表明,该方法能够显著改善传感器的测量精度,提高其在实际应用中的可靠性。关键词:三轴磁通门传感器;误差校正;RANSAC算法1.引

基于共轭次梯度算法的磁传感器安装误差校正.docx
基于共轭次梯度算法的磁传感器安装误差校正AbstractMagneticsensorsarewidelyusedinmanyapplications,suchasmagneticnavigation,robotics,andautomation.However,theiraccuracycanbeaffectedbyvariouserrors,includinginstallationerrors.Thispaperpresentsamethodtocorrectmagneticsensorinstall
基于三轴磁通门传感器的磁小模块系统.pdf
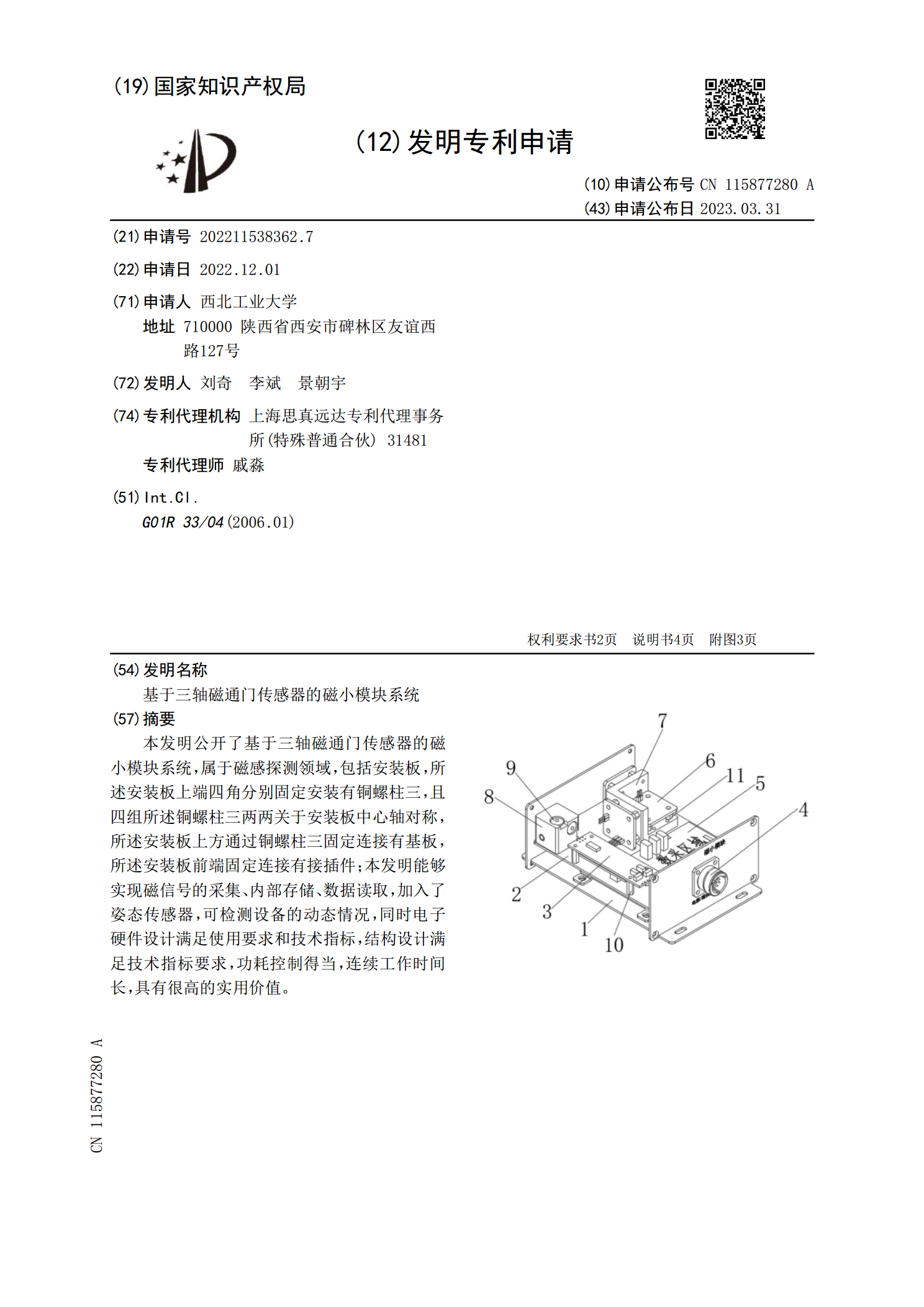
本发明公开了基于三轴磁通门传感器的磁小模块系统,属于磁感探测领域,包括安装板,所述安装板上端四角分别固定安装有铜螺柱三,且四组所述铜螺柱三两两关于安装板中心轴对称,所述安装板上方通过铜螺柱三固定连接有基板,所述安装板前端固定连接有接插件;本发明能够实现磁信号的采集、内部存储、数据读取,加入了姿态传感器,可检测设备的动态情况,同时电子硬件设计满足使用要求和技术指标,结构设计满足技术指标要求,功耗控制得当,连续工作时间长,具有很高的实用价值。

基于SoC与CPLD的数字化三轴磁通门传感器.docx
基于SoC与CPLD的数字化三轴磁通门传感器摘要数字化三轴磁通门传感器是一种可测量磁场的传感器,可以帮助我们计算地球的磁场。本论文介绍了基于SoC与CPLD的数字化三轴磁通门传感器的设计和实现。首先对传感器的原理和设计思路进行了介绍,然后详细阐述了数字化电路设计和仿真实验结果。最后通过实验验证了数字化三轴磁通门传感器的性能和稳定性。关键词:数字化三轴磁通门传感器,SoC,CPLD,数字化电路设计,仿真实验引言地球的磁场是由地球内部熔岩流动产生的。磁场对我们生活中许多方面都有影响。例如,船只在海上行驶时,需

基于自适应遗传算法的三轴磁强计误差校正方法.docx
基于自适应遗传算法的三轴磁强计误差校正方法基于自适应遗传算法的三轴磁强计误差校正方法摘要:磁强计是一种用于测量磁场强度的设备,广泛应用于导航、无人机、自动驾驶等领域。然而,由于硬件制造和环境干扰等因素,磁强计常常存在误差。为了准确测量磁场强度,需要进行误差校正。本文提出了一种基于自适应遗传算法的三轴磁强计误差校正方法。该方法通过自适应遗传算法优化校正模型的参数,实现了对磁强计误差的准确校正。实验结果表明,该方法能够有效提高磁强计的测量精度,具有较好的实用性和稳定性。关键词:磁强计;误差校正;自适应遗传算法