
基于CAN总线的运动控制通讯系统设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于CAN总线的运动控制通讯系统设计.docx
基于CAN总线的运动控制通讯系统设计随着现代机械制造技术的快速发展,越来越多的工业设备需要实现运动控制,在此过程中,基于控制器区域网络(ControllerAreaNetwork,CAN)总线的运动控制通讯系统设计也日益受到关注。本文将探讨CAN总线在运动控制通讯系统中的应用,并重点介绍其设计流程和关键技术。一、概述CAN总线是一种高性能、可靠的串行通讯协议,最初用于汽车电子控制系统,在工业领域中得到了广泛应用。相比于传统的串行通信协议,CAN总线具有实时性好、网络规模大、抗干扰能力强等优势。在运动控制系
一种基于CAN总线的运动控制通讯系统及通讯方法.pdf
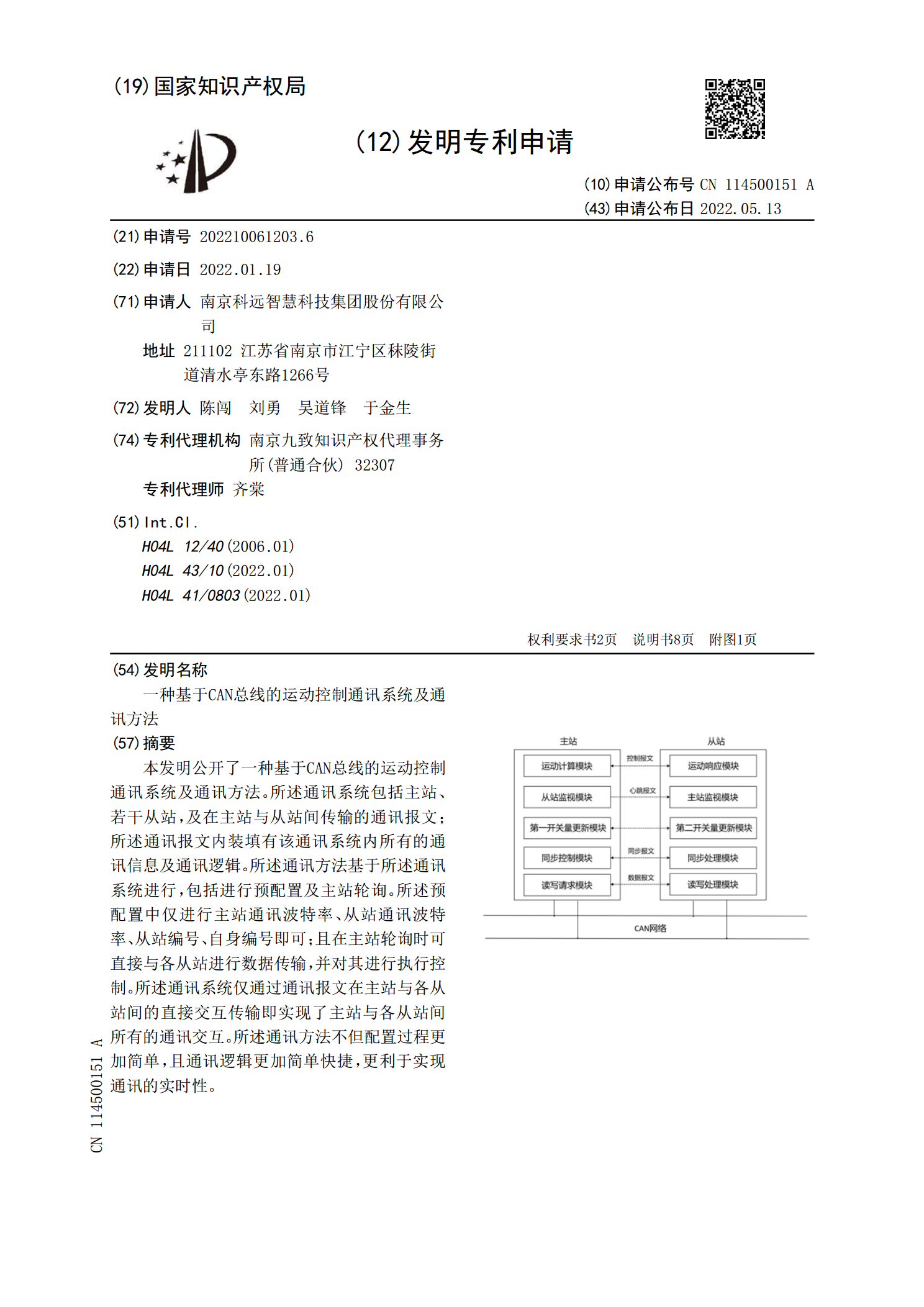
本发明公开了一种基于CAN总线的运动控制通讯系统及通讯方法。所述通讯系统包括主站、若干从站,及在主站与从站间传输的通讯报文;所述通讯报文内装填有该通讯系统内所有的通讯信息及通讯逻辑。所述通讯方法基于所述通讯系统进行,包括进行预配置及主站轮询。所述预配置中仅进行主站通讯波特率、从站通讯波特率、从站编号、自身编号即可;且在主站轮询时可直接与各从站进行数据传输,并对其进行执行控制。所述通讯系统仅通过通讯报文在主站与各从站间的直接交互传输即实现了主站与各从站间所有的通讯交互。所述通讯方法不但配置过程更加简单,且通

基于CAN总线的运动控制板卡设计.pptx
汇报人:目录PARTONEPARTTWOCAN总线的定义和特点CAN总线在运动控制系统中的应用CAN总线的通信协议和规范PARTTHREE板卡的功能和设计要求硬件电路设计嵌入式软件设计人机交互界面设计PARTFOUR实验设备和测试环境实验和测试过程实验和测试结果分析PARTFIVE性能指标和评价方法优化算法和实现方法优化结果分析和比较PARTSIX毕业论文总结未来研究展望THANKYOU

基于CAN总线的运动控制板卡设计.docx
基于CAN总线的运动控制板卡设计CAN(ControllerAreaNetwork)总线是一种实时性能非常好的现代串行通信总线。它最初被用于汽车和工业自动化领域中,但在其他的应用中也得到了广泛的应用。CAN总线由德国Bosch公司于1986年开始开发,旨在解决车辆之间的通信问题。随着时间的推移,CAN总线开始得到了普及并被广泛应用于工业自动化领域,尤其是在运动控制领域中。CAN总线有一些特性,如实时性好、噪声干扰抑制能力强、可靠性高、数据帧结构简单等,使其成为运动控制领域中一个重要的数据通信标准。基于CA

基于CAN总线的车灯控制系统设计.docx
基于CAN总线的车灯控制系统设计车灯控制系统在汽车上起到非常重要的作用,能够提升驾驶安全性和驾驶的舒适性。CAN总线是现代汽车上常用的通信协议,具有可靠、高效的特点,因此本文将基于CAN总线设计车灯控制系统。一、系统组成该车灯控制系统由以下组成部分构成:1.中央控制器:负责整个系统的数据处理和控制指令下发,并负责数据的传输与接收。2.CAN总线通信模块:将中央控制器下发的指令转换成CAN总线数据包进行通信。3.车灯控制器:接收CAN总线数据包,控制相应的车灯开关状态,包括前照灯、示宽灯、刹车灯、后备箱灯等