
吊臂被动补偿装置的抗冲击性能研究.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

吊臂被动补偿装置的抗冲击性能研究.docx
吊臂被动补偿装置的抗冲击性能研究吊臂被动补偿装置的抗冲击性能研究摘要:随着工业技术的发展,吊臂在现代工程中扮演着重要角色。然而,吊臂在提升重物过程中常常面临冲击力的挑战。为了提高吊臂的工作效率和安全性,研究吊臂被动补偿装置的抗冲击性能具有重要意义。本文通过分析吊臂工作原理和冲击力的特点,研究了吊臂被动补偿装置的设计原则和方法,并通过数值模拟和实验验证了该装置的抗冲击性能。研究结果表明,吊臂被动补偿装置可以有效减少冲击力,提高吊臂的稳定性和安全性。关键词:吊臂;被动补偿装置;抗冲击性能;稳定性;安全性目录:

基于建筑材料抗冲击性能装置研究.pptx
汇报人:目录PARTONE装置工作原理抗冲击性能测试原理装置的构成和功能装置的应用范围PARTTWO装置的设计理念装置的结构设计装置的材料选择装置的制造工艺PARTTHREE测试方法与标准测试过程与结果结果分析与验证装置的优缺点分析PARTFOUR建筑行业的发展趋势装置的应用前景技术创新与改进方向对未来建筑行业的影响和展望PARTFIVE研究成果总结对未来研究的建议和展望THANKYOU

被动变阻尼耗能装置的设计与性能试验研究.docx
被动变阻尼耗能装置的设计与性能试验研究被动变阻尼耗能装置的设计与性能试验研究摘要:本文针对建筑结构中的地震振动控制问题,提出了一种被动变阻尼耗能装置的设计方案,并进行了相应性能试验研究。首先,通过分析建筑结构的振动特性和地震作用的特点,确定了采用被动变阻尼耗能装置进行结构振动控制的可行性。然后,针对装置的设计进行了详细阐述,包括装置的基本原理、设计方法和参数选择。接着,对设计的装置进行了性能试验,验证了其抗震性能和稳定性。最后,对试验结果进行了分析和讨论,总结了被动变阻尼耗能装置的设计与性能试验研究成果,
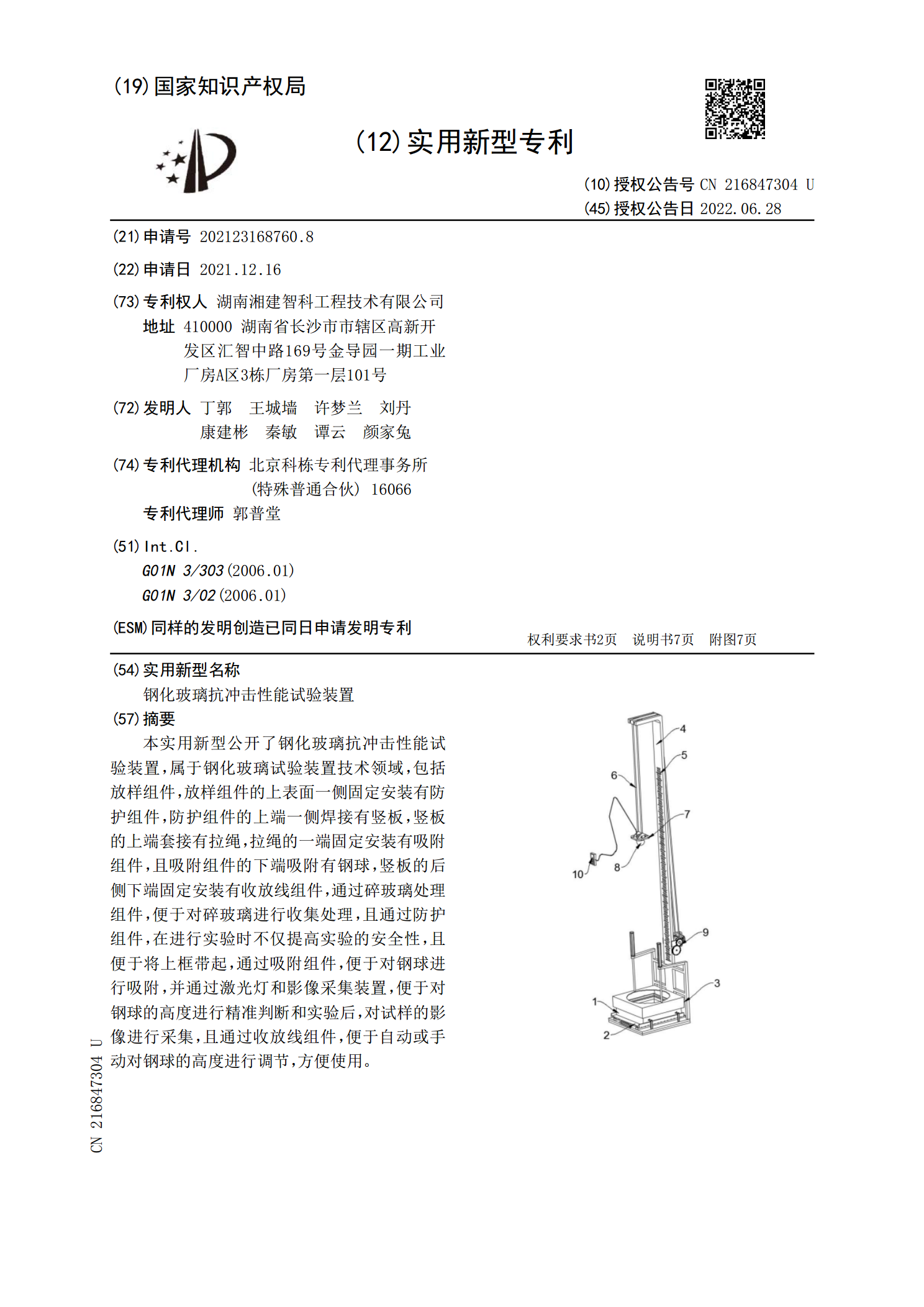
钢化玻璃抗冲击性能试验装置.pdf
本实用新型公开了钢化玻璃抗冲击性能试验装置,属于钢化玻璃试验装置技术领域,包括放样组件,放样组件的上表面一侧固定安装有防护组件,防护组件的上端一侧焊接有竖板,竖板的上端套接有拉绳,拉绳的一端固定安装有吸附组件,且吸附组件的下端吸附有钢球,竖板的后侧下端固定安装有收放线组件,通过碎玻璃处理组件,便于对碎玻璃进行收集处理,且通过防护组件,在进行实验时不仅提高实验的安全性,且便于将上框带起,通过吸附组件,便于对钢球进行吸附,并通过激光灯和影像采集装置,便于对钢球的高度进行精准判断和实验后,对试样的影像进行采集,

建筑玻璃抗冲击性能研究.docx
建筑玻璃抗冲击性能研究建筑玻璃抗冲击性能研究引言建筑玻璃是现代建筑中常见的材料之一,具有透明、坚固、美观的特点。然而,由于自然灾害、人为破坏等原因,建筑玻璃常常会遭受冲击,对建筑的稳定性和安全性构成威胁。因此,研究建筑玻璃的抗冲击性能对于提高建筑的抗冲击能力具有重要意义。一、建筑玻璃的分类建筑玻璃按照材质的不同可分为钢化玻璃、夹层玻璃、层压玻璃等。其中,夹层玻璃和层压玻璃具有较好的抗冲击性能。二、抗冲击性能的评估指标1.冲击试验:通过设计合适的冲击试验装置,模拟实际的冲击情况,对建筑玻璃进行冲击试验,评估