
一种医疗影像设备专用多坐标伺服驱动方法和装置.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种医疗影像设备专用多坐标伺服驱动方法和装置.docx
一种医疗影像设备专用多坐标伺服驱动方法和装置摘要:本文介绍了一种医疗影像设备专用的多坐标伺服驱动方法和装置,该装置可以实现医疗影像设备的高精度运动控制。该驱动方法和装置采用多轴驱动结构,通过多路控制信号的协调实现动作的精确调控。同时,本文还详细介绍了该驱动方法和装置的工作原理、系统框架以及实验结果,为医疗影像设备的研究与设计提供了有益的参考。关键词:医疗影像设备、多坐标伺服驱动、多路控制信号、高精度控制、实验结果。一、引言医疗影像设备是现代医疗中极为重要的设备之一,它的作用是通过图像的获取和处理,帮助医护
一种医疗影像的处理方法、装置、设备和系统.pdf
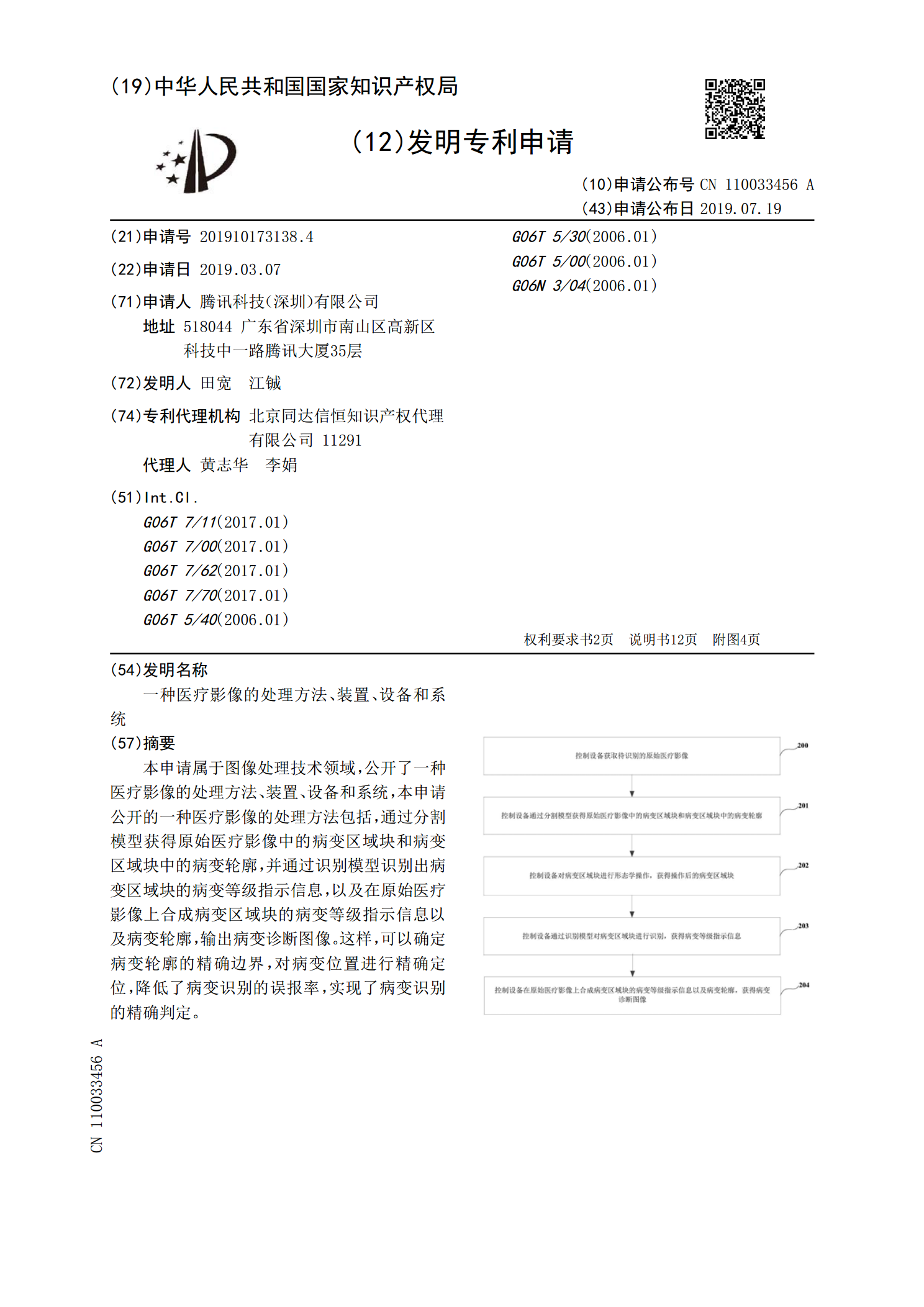
本申请属于图像处理技术领域,公开了一种医疗影像的处理方法、装置、设备和系统,本申请公开的一种医疗影像的处理方法包括,通过分割模型获得原始医疗影像中的病变区域块和病变区域块中的病变轮廓,并通过识别模型识别出病变区域块的病变等级指示信息,以及在原始医疗影像上合成病变区域块的病变等级指示信息以及病变轮廓,输出病变诊断图像。这样,可以确定病变轮廓的精确边界,对病变位置进行精确定位,降低了病变识别的误报率,实现了病变识别的精确判定。
一种医疗影像的处理系统、方法、装置和设备.pdf
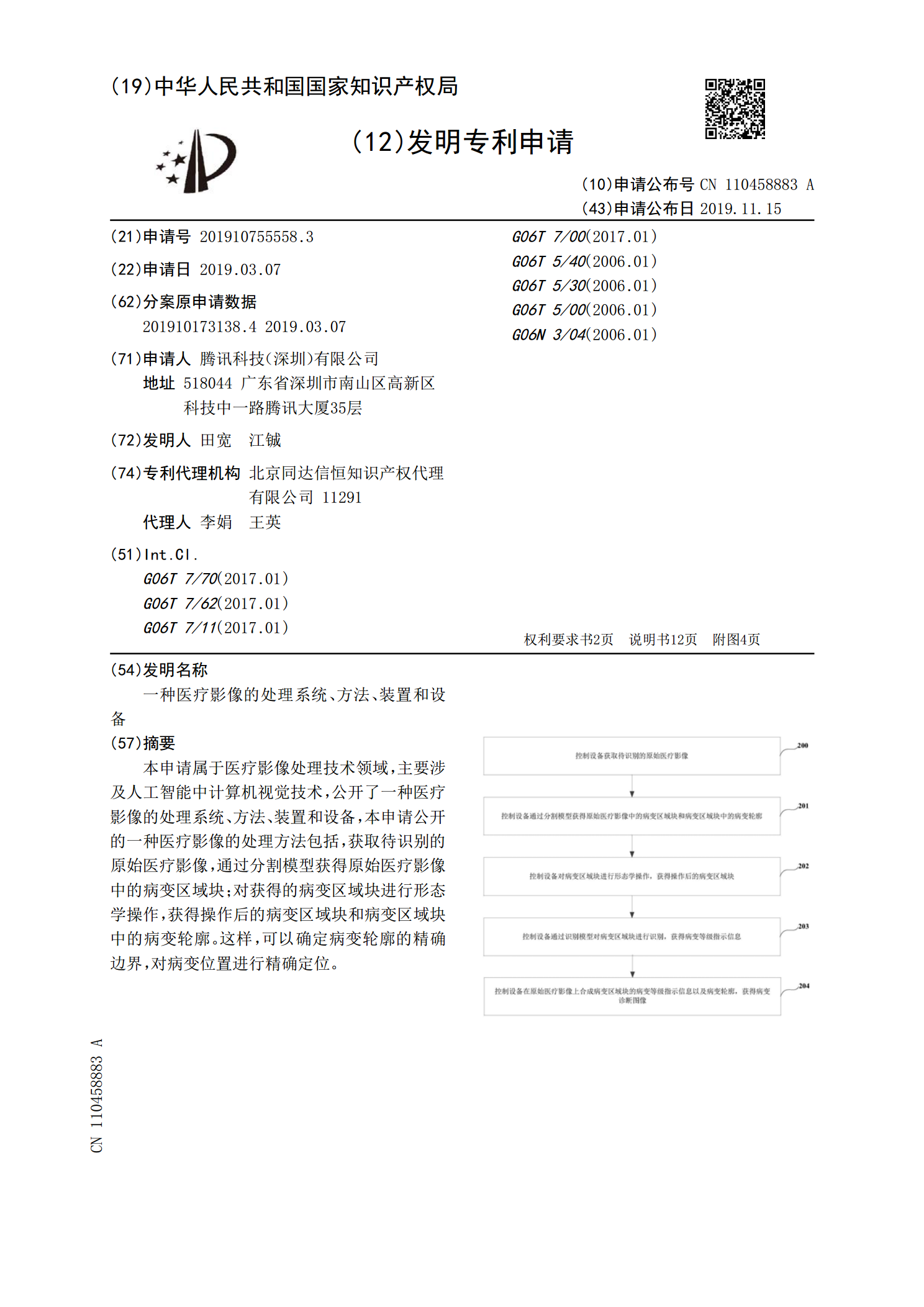
本申请属于医疗影像处理技术领域,主要涉及人工智能中计算机视觉技术,公开了一种医疗影像的处理系统、方法、装置和设备,本申请公开的一种医疗影像的处理方法包括,获取待识别的原始医疗影像,通过分割模型获得原始医疗影像中的病变区域块;对获得的病变区域块进行形态学操作,获得操作后的病变区域块和病变区域块中的病变轮廓。这样,可以确定病变轮廓的精确边界,对病变位置进行精确定位。
一种驱动装置和医疗设备.pdf
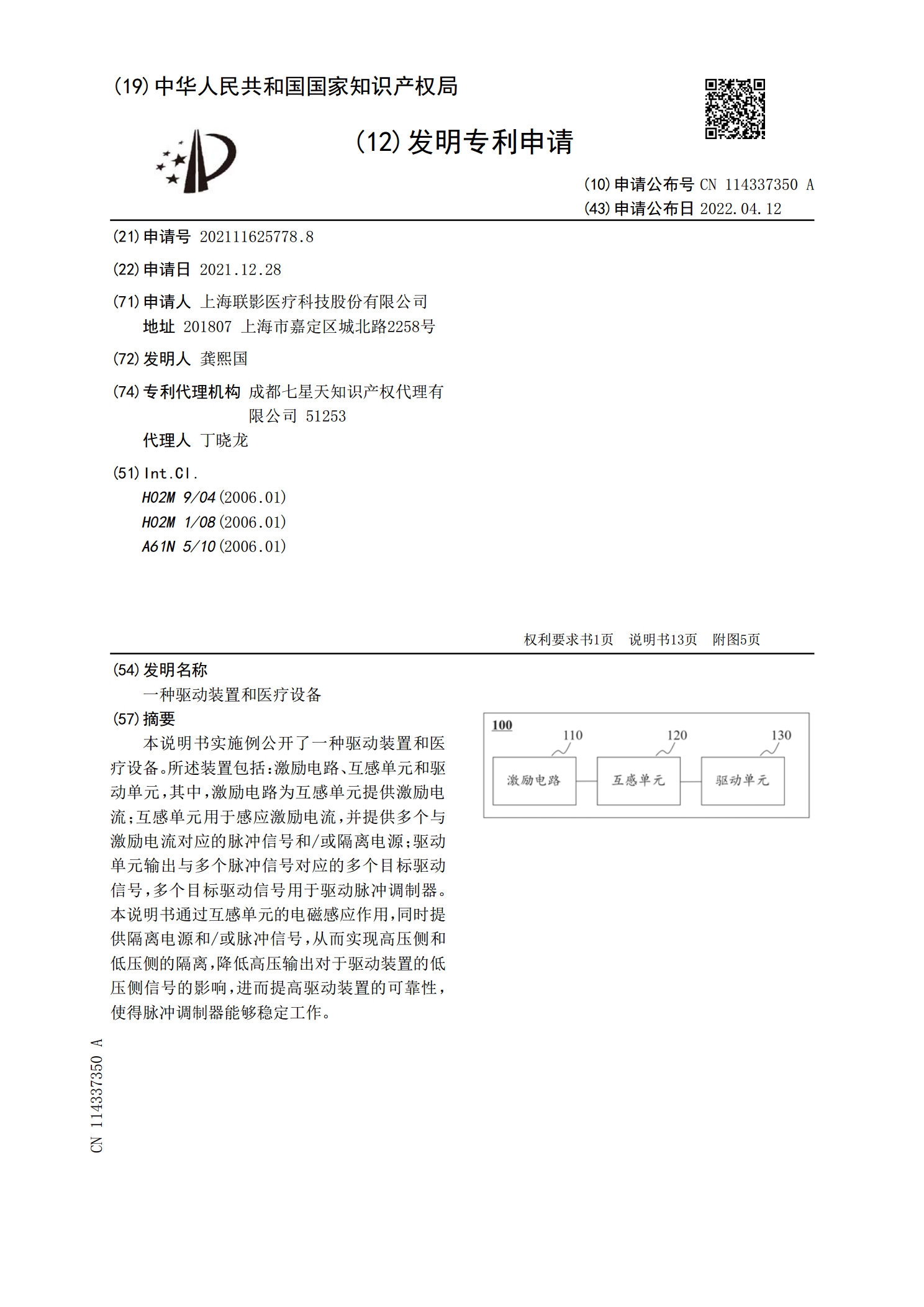
本说明书实施例公开了一种驱动装置和医疗设备。所述装置包括:激励电路、互感单元和驱动单元,其中,激励电路为互感单元提供激励电流;互感单元用于感应激励电流,并提供多个与激励电流对应的脉冲信号和/或隔离电源;驱动单元输出与多个脉冲信号对应的多个目标驱动信号,多个目标驱动信号用于驱动脉冲调制器。本说明书通过互感单元的电磁感应作用,同时提供隔离电源和/或脉冲信号,从而实现高压侧和低压侧的隔离,降低高压输出对于驱动装置的低压侧信号的影响,进而提高驱动装置的可靠性,使得脉冲调制器能够稳定工作。

一种多缸同步伺服驱动平台及驱动方法.pdf
本发明公开了一种多缸同步伺服驱动平台及驱动方法,包括液压机械装置和控制系统,所述液压机械装置包括负载装置和液压装置;所述液压装置包括至少两个第一液压装置,所述第一液压装置与负载装置连接,用于提供支撑力,以平衡所述负载装置的重力;所述液压装置包括至少两个第二液压装置,每个所述第二液压装置包括一个液压缸,所述液压缸与负载装置连接,所述第二液压装置用于提供驱动力,使得所述负载装置在竖直方向运动;所述控制装置用于控制所述第一液压装置的支撑力,并控制所述第二液压装置的液压缸的行程,并使每个所述第二液压装置的液压缸的