
LQGLTR在飞机高度保持控制模态中的应用.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

LQGLTR在飞机高度保持控制模态中的应用.docx
LQGLTR在飞机高度保持控制模态中的应用LQGLTR在飞机高度保持控制模态中的应用摘要:LQGLTR(线性二次型广义联合状态反馈-限制器)是一种常用于控制系统设计的方法,该方法结合了线性二次型控制器和限制器的优势,能够平衡控制系统的性能和稳定性要求。本文将介绍LQGLTR方法在飞机高度保持控制中的应用,包括问题介绍、系统建模、控制器设计和仿真结果展示等内容。第一章引言1.1研究背景对于飞机来说,高度控制是一项非常重要的任务。在飞行中,飞机需要保持在一个特定的高度上,以确保安全和舒适的飞行。因此,设计一种
一种大型飞机高度保持自动控制方法.pdf
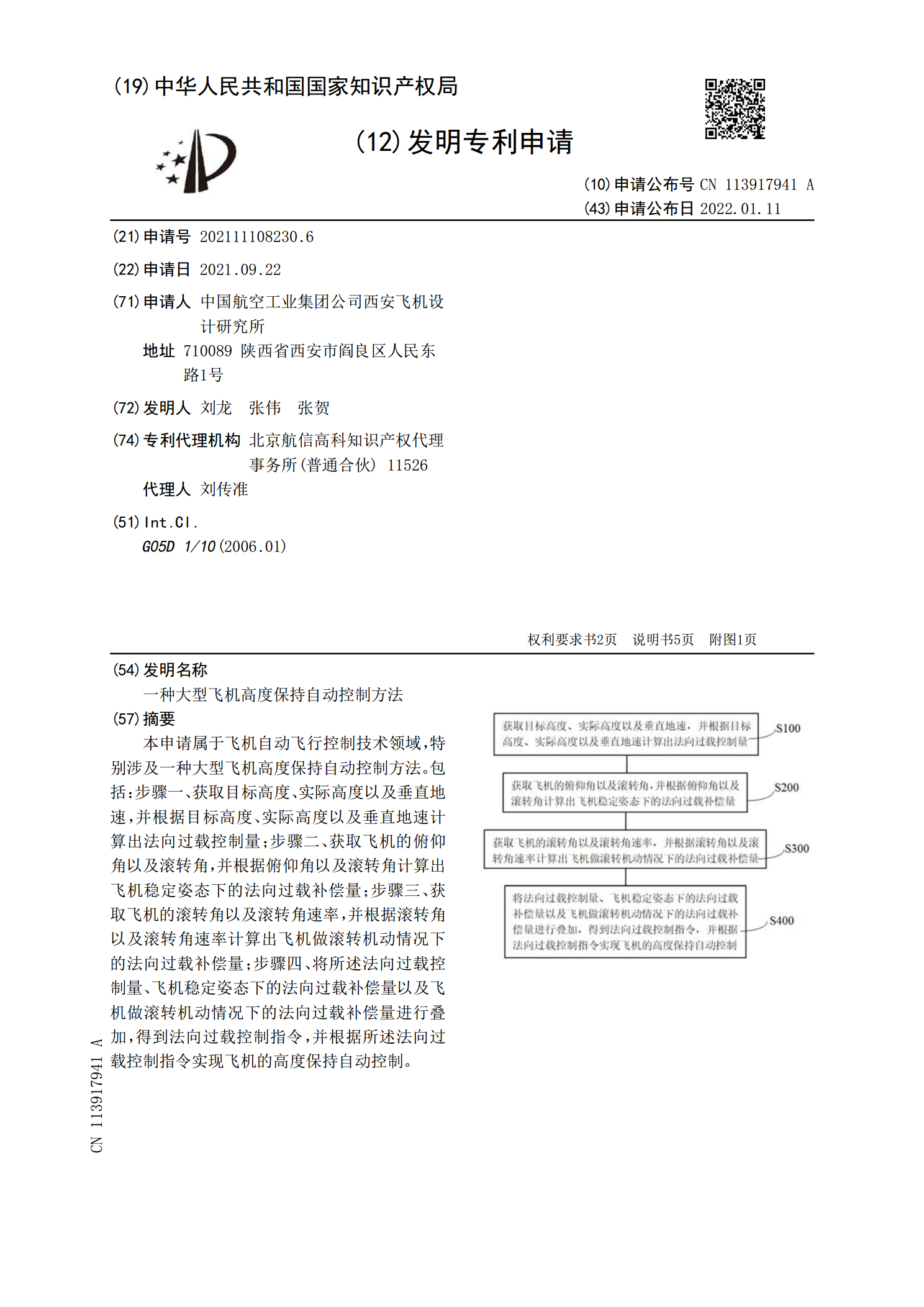
本申请属于飞机自动飞行控制技术领域,特别涉及一种大型飞机高度保持自动控制方法。包括:步骤一、获取目标高度、实际高度以及垂直地速,并根据目标高度、实际高度以及垂直地速计算出法向过载控制量;步骤二、获取飞机的俯仰角以及滚转角,并根据俯仰角以及滚转角计算出飞机稳定姿态下的法向过载补偿量;步骤三、获取飞机的滚转角以及滚转角速率,并根据滚转角以及滚转角速率计算出飞机做滚转机动情况下的法向过载补偿量;步骤四、将所述法向过载控制量、飞机稳定姿态下的法向过载补偿量以及飞机做滚转机动情况下的法向过载补偿量进行叠加,得到法向

LQGLTR控制在二级倒立摆系统中的应用研究.docx
LQGLTR控制在二级倒立摆系统中的应用研究随着现代控制理论的不断发展,各种新型控制技术得到了广泛应用,其在各种工程领域中的应用也更加广泛。在飞行器、机器人、汽车等各种控制系统中,倒立摆系统为一个重要的研究对象。因为它不仅是一个复杂的非线性控制系统,而且它在机器人控制、运动控制、空间姿态控制等各种应用中都有很大的潜在价值。而LQGLTR控制也是其中的一种智能控制方法,对于二级倒立摆系统中的控制具有广泛应用价值。1.LQGLTR控制LQGLTR是线性二次型广义预测控制(LinearQuadraticGaus

基于LQGLTR方法的飞机自动着陆系统设计.docx
基于LQGLTR方法的飞机自动着陆系统设计随着航空技术的不断发展和完善,飞机作为一种重要的交通工具,在现代社会中扮演了越来越重要的角色。然而,飞机着陆是一个非常重要的环节,也是飞机安全的关键之一。为保证着陆的安全性和稳定性,目前已经发展出了多种自动着陆系统,其中基于LQGLTR方法的自动着陆系统是一种较为成熟和广泛使用的方法。LQGLTR方法是一种基于最优控制理论的自动控制方法,在飞机自动着陆系统中应用广泛。LQGLTR方法的基本思想是通过优化控制算法,使得控制器输出的控制信号与被控对象的状态变化达到最优

应用摄动法确定飞机的模态特性.docx
应用摄动法确定飞机的模态特性摘要:飞机模态特性是指飞机在特定飞行状态下的振动特性,包括自由降落模态、自由振动模态和强迫响应模态等。了解飞机的模态特性对飞机的结构设计、飞行安全性和飞行品质具有重要意义。本论文以摄动法为研究方法,对飞机模态特性进行了探究。首先介绍了摄动法的基本原理和应用领域,然后详细阐述了摄动法在飞机模态特性中的应用方法和技术路线。接下来,通过实例分析的方式,选取一个具体的飞机结构,采用摄动法进行了模态分析,并对结果进行了解读。最后,总结了摄动法在飞机模态特性研究中的优势和不足之处,提出了进