
一种气垫式越野机器人.pdf

一只****懿呀

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种气垫式越野机器人.pdf
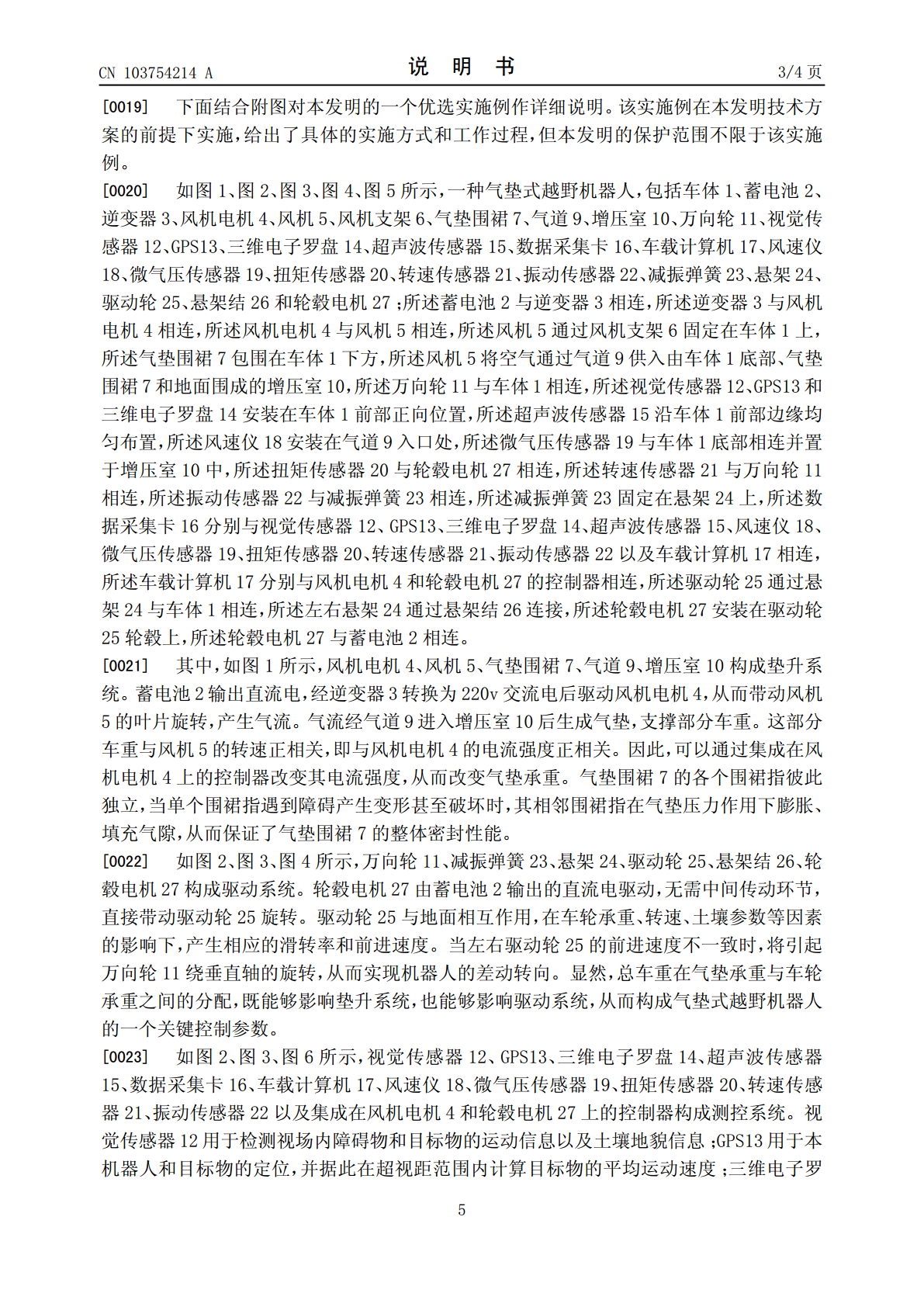
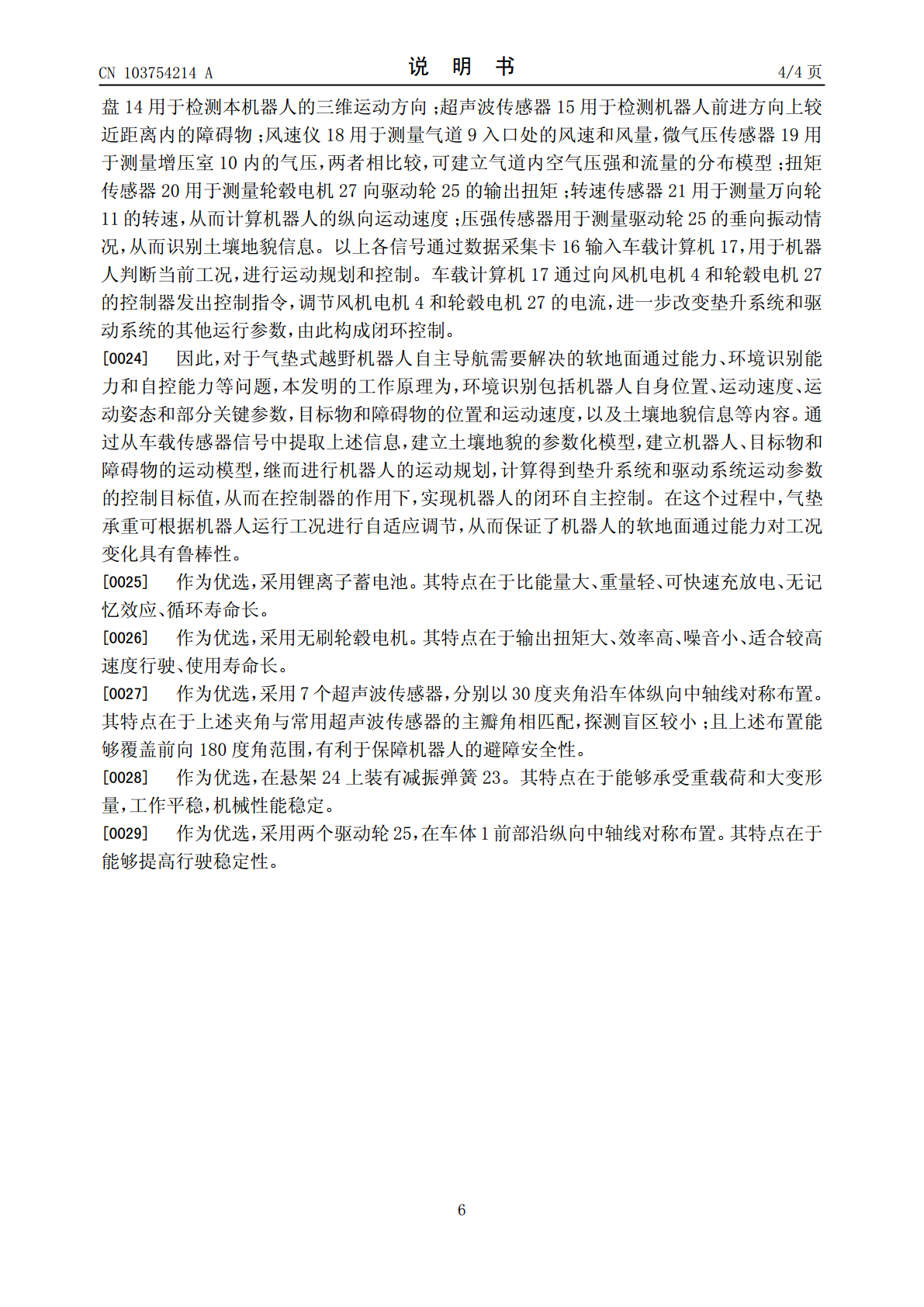
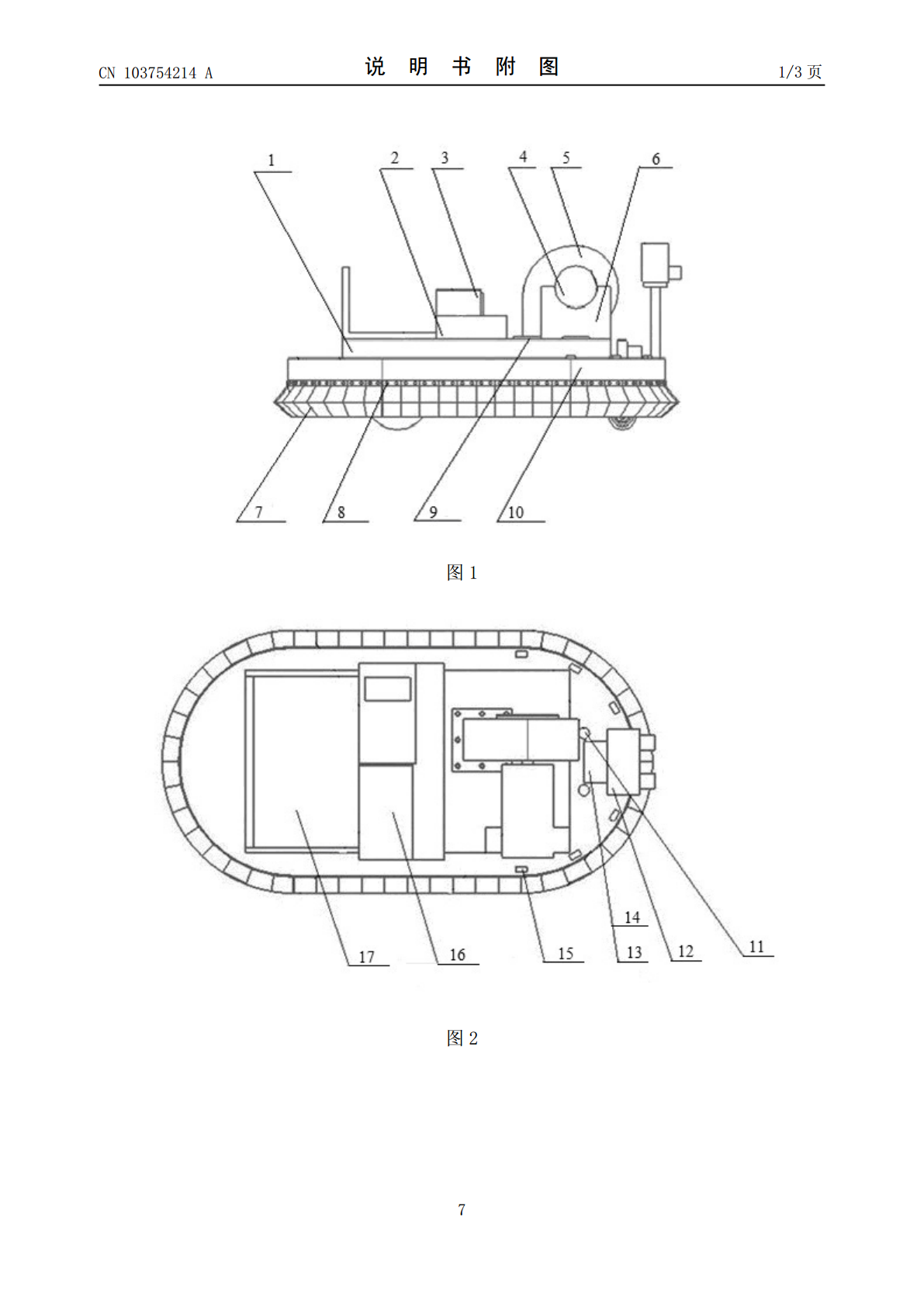
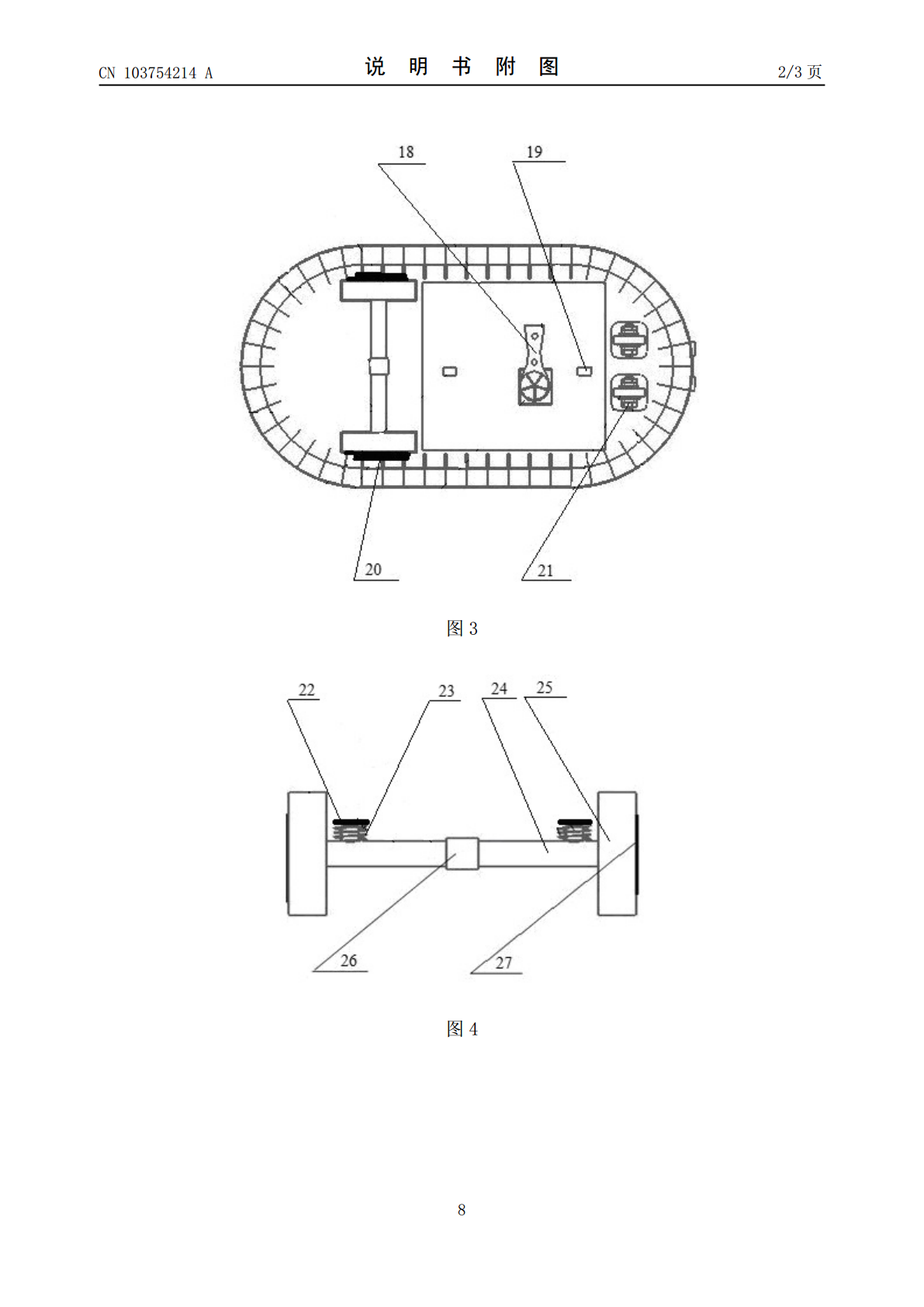
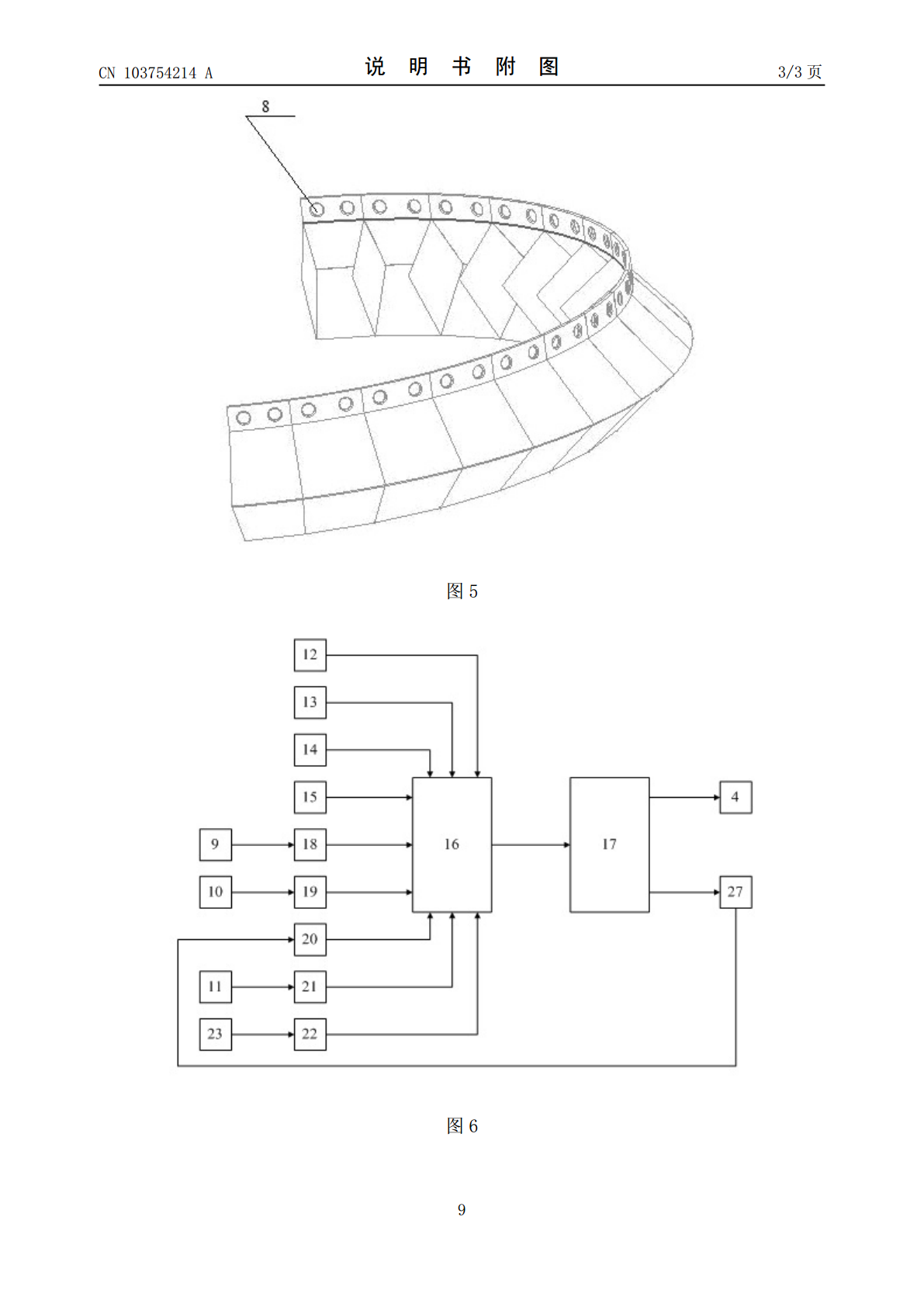
本发明涉及一种气垫式越野机器人,具体涉及一种气垫与常规行走机构相结合的具有软地面自主导航能力的全电动气垫式越野机器人。它由车体、蓄电池、逆变器、风机电机、风机、风机支架、气垫围裙、围裙安装孔、气道、增压室、万向轮、视觉传感器、GPS、三维电子罗盘、超声波传感器、数据采集卡、车载计算机、风速仪、微气压传感器、扭矩传感器、转速传感器、振动传感器、减振弹簧、悬架、驱动轮、悬架结和轮毂电机组成,这些部件分别构成垫升系统、驱动系统和测控系统,使机器人具备了软地面自主导航所需要的通过能力、环境识别能力和自控能力。本发
一种越野式底盘部件以及机器人总成.pdf
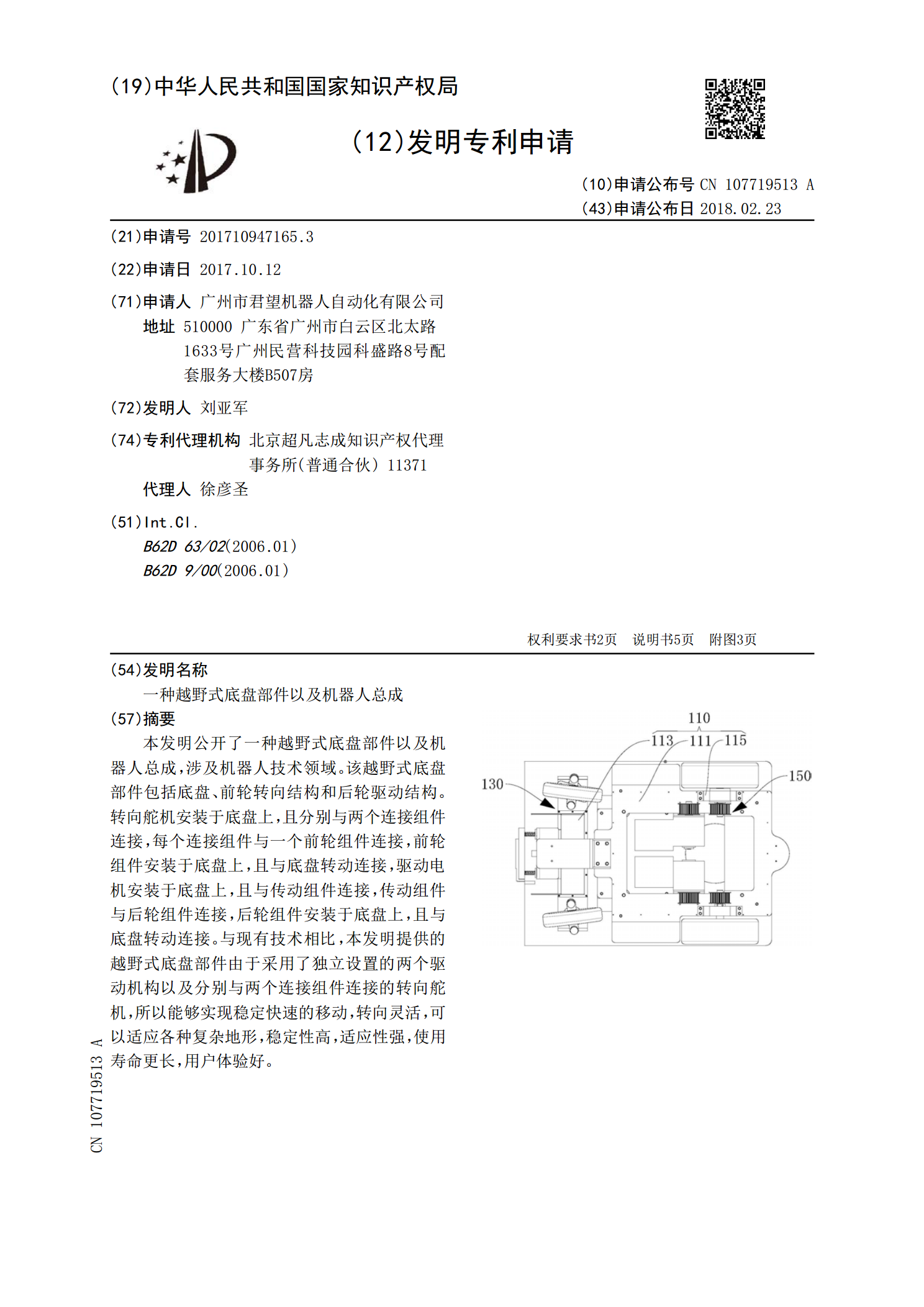
本发明公开了一种越野式底盘部件以及机器人总成,涉及机器人技术领域。该越野式底盘部件包括底盘、前轮转向结构和后轮驱动结构。转向舵机安装于底盘上,且分别与两个连接组件连接,每个连接组件与一个前轮组件连接,前轮组件安装于底盘上,且与底盘转动连接,驱动电机安装于底盘上,且与传动组件连接,传动组件与后轮组件连接,后轮组件安装于底盘上,且与底盘转动连接。与现有技术相比,本发明提供的越野式底盘部件由于采用了独立设置的两个驱动机构以及分别与两个连接组件连接的转向舵机,所以能够实现稳定快速的移动,转向灵活,可以适应各种复杂
气垫式机器人移动平台及其控制方法.pdf
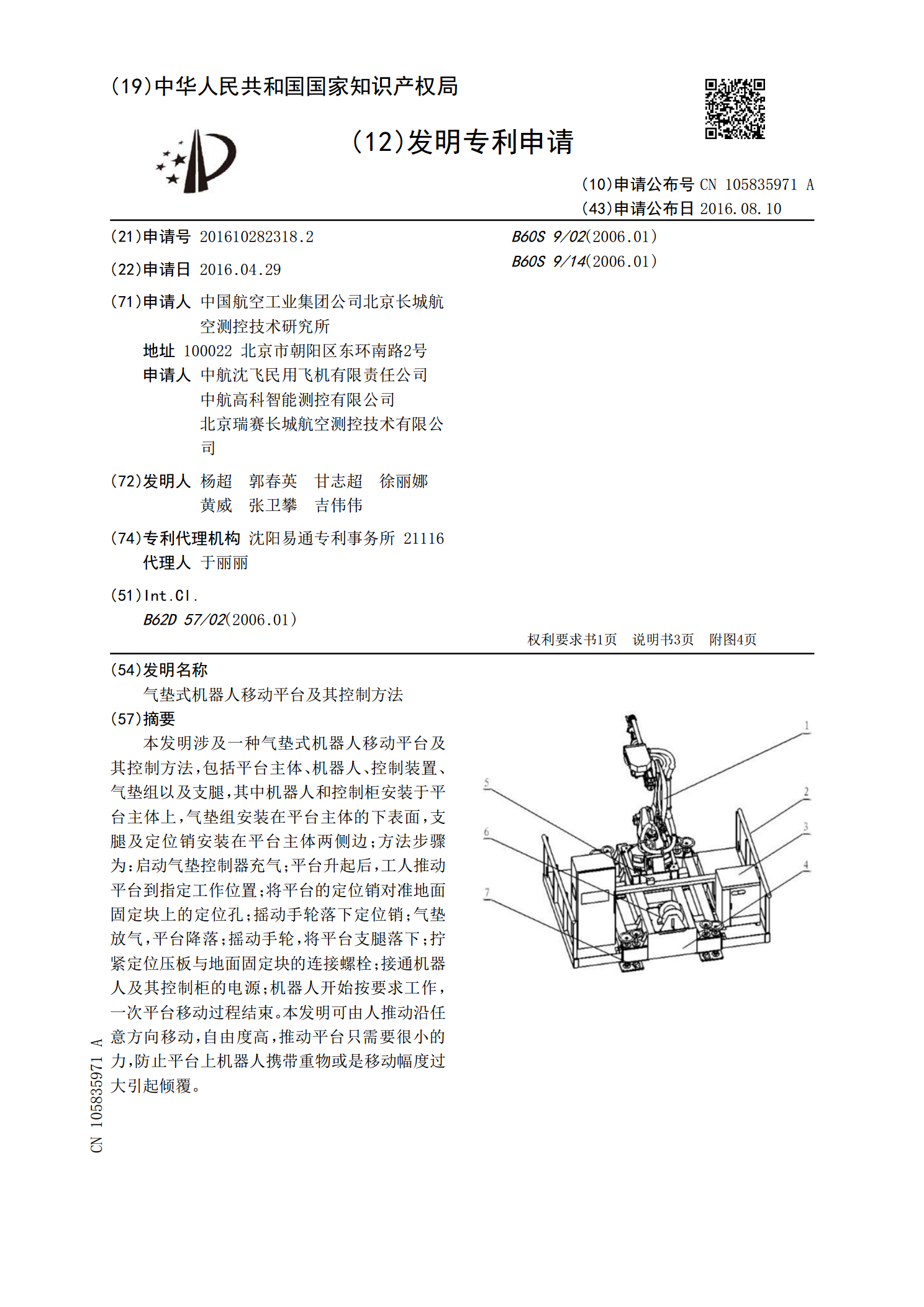
本发明涉及一种气垫式机器人移动平台及其控制方法,包括平台主体、机器人、控制装置、气垫组以及支腿,其中机器人和控制柜安装于平台主体上,气垫组安装在平台主体的下表面,支腿及定位销安装在平台主体两侧边;方法步骤为:启动气垫控制器充气;平台升起后,工人推动平台到指定工作位置;将平台的定位销对准地面固定块上的定位孔;摇动手轮落下定位销;气垫放气,平台降落;摇动手轮,将平台支腿落下;拧紧定位压板与地面固定块的连接螺栓;接通机器人及其控制柜的电源;机器人开始按要求工作,一次平台移动过程结束。本发明可由人推动沿任意方向移
一种可穿式气垫玩具.pdf
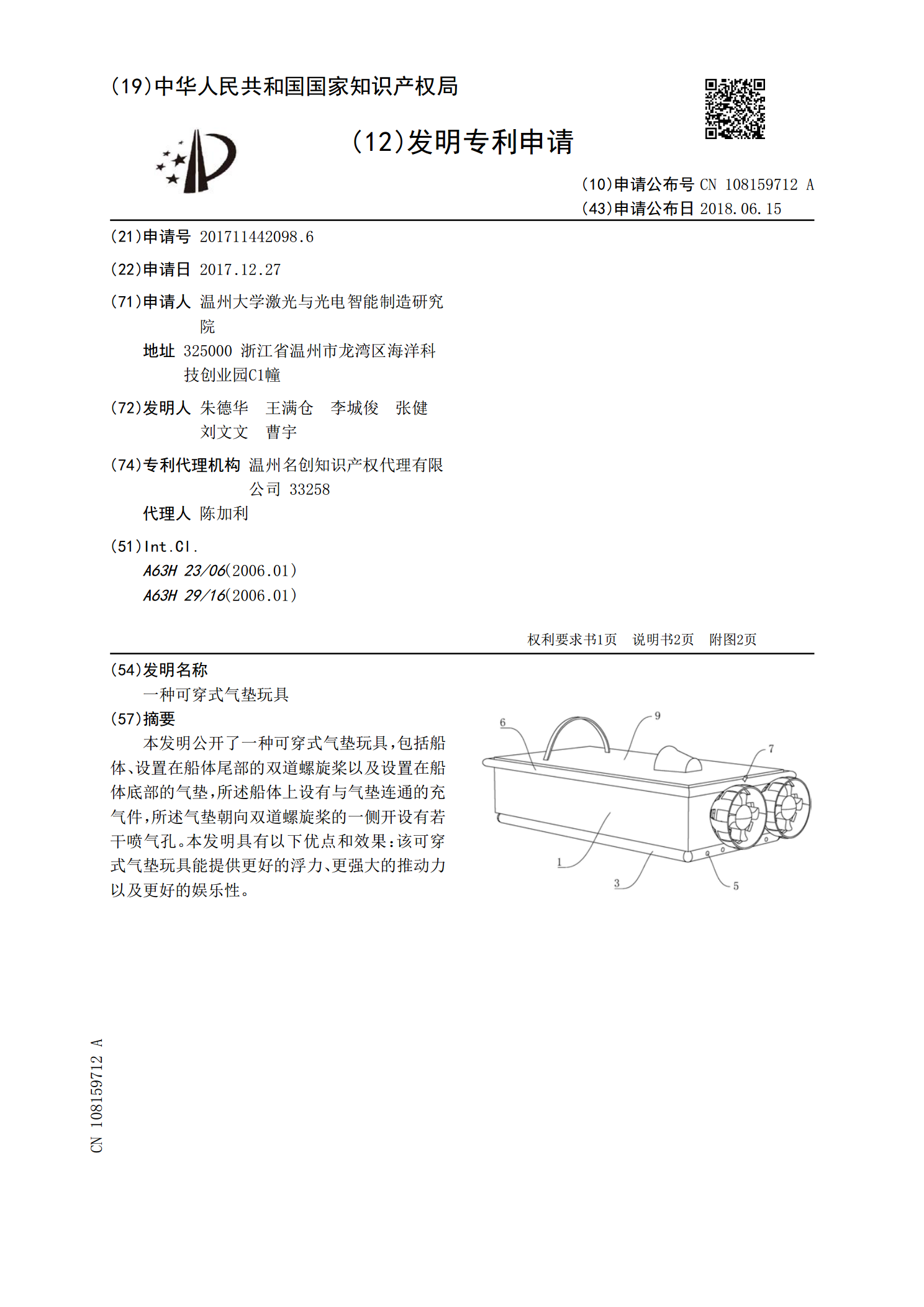
本发明公开了一种可穿式气垫玩具,包括船体、设置在船体尾部的双道螺旋桨以及设置在船体底部的气垫,所述船体上设有与气垫连通的充气件,所述气垫朝向双道螺旋桨的一侧开设有若干喷气孔。本发明具有以下优点和效果:该可穿式气垫玩具能提供更好的浮力、更强大的推动力以及更好的娱乐性。
一种气垫式裁剪机.pdf
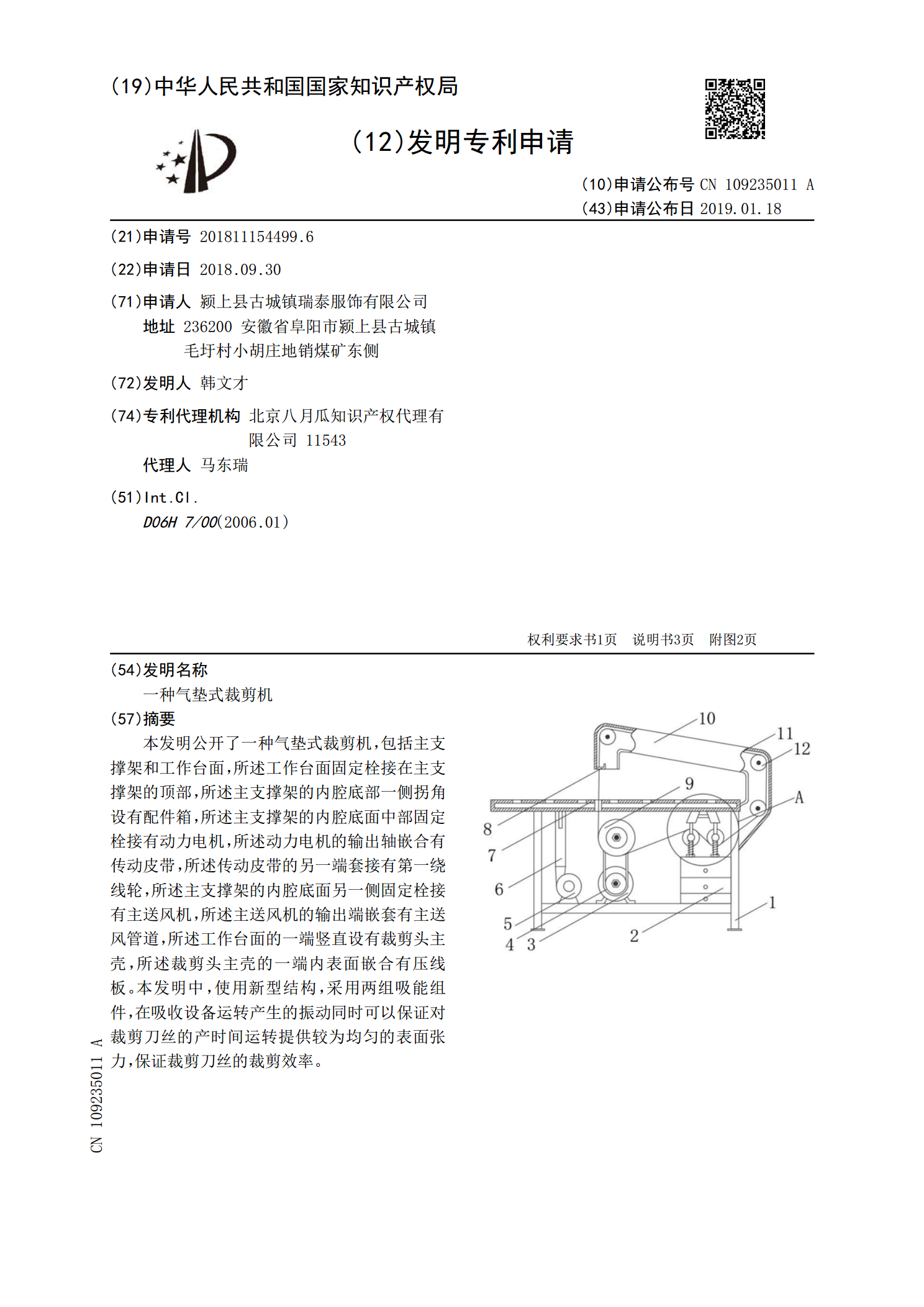
本发明公开了一种气垫式裁剪机,包括主支撑架和工作台面,所述工作台面固定栓接在主支撑架的顶部,所述主支撑架的内腔底部一侧拐角设有配件箱,所述主支撑架的内腔底面中部固定栓接有动力电机,所述动力电机的输出轴嵌合有传动皮带,所述传动皮带的另一端套接有第一绕线轮,所述主支撑架的内腔底面另一侧固定栓接有主送风机,所述主送风机的输出端嵌套有主送风管道,所述工作台面的一端竖直设有裁剪头主壳,所述裁剪头主壳的一端内表面嵌合有压线板。本发明中,使用新型结构,采用两组吸能组件,在吸收设备运转产生的振动同时可以保证对裁剪刀丝的产