
确定应用到壳组件的轮廓组件的位置的测量方法和装置.pdf

长春****主a


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

确定应用到壳组件的轮廓组件的位置的测量方法和装置.pdf
本发明涉及一种用于确定放置在飞行器的壳组件(1)上的欧米伽轮廓组件(2)的位置的测量方法,其中,以非接触的方式光学地获得欧米伽轮廓组件(2)相对于壳组件(1)的实际位置,从而随后将实际位置与定义的期望位置进行比较,其中,在欧米伽轮廓组件(2)的轮廓横截面的两个相对侧边(7a,7b;7a’,7b’)处,建立若干相邻间隔开的测量点(6,6’),通过测量点(6,6’)基于坐标根据路径测量原理延展回归线(8a,8b;8a’,8b’),使用回归线(8a,8b;8a’,8b’)的交叉点(9;9’)来确定欧米伽轮廓组件
壳组件和移动终端.pdf
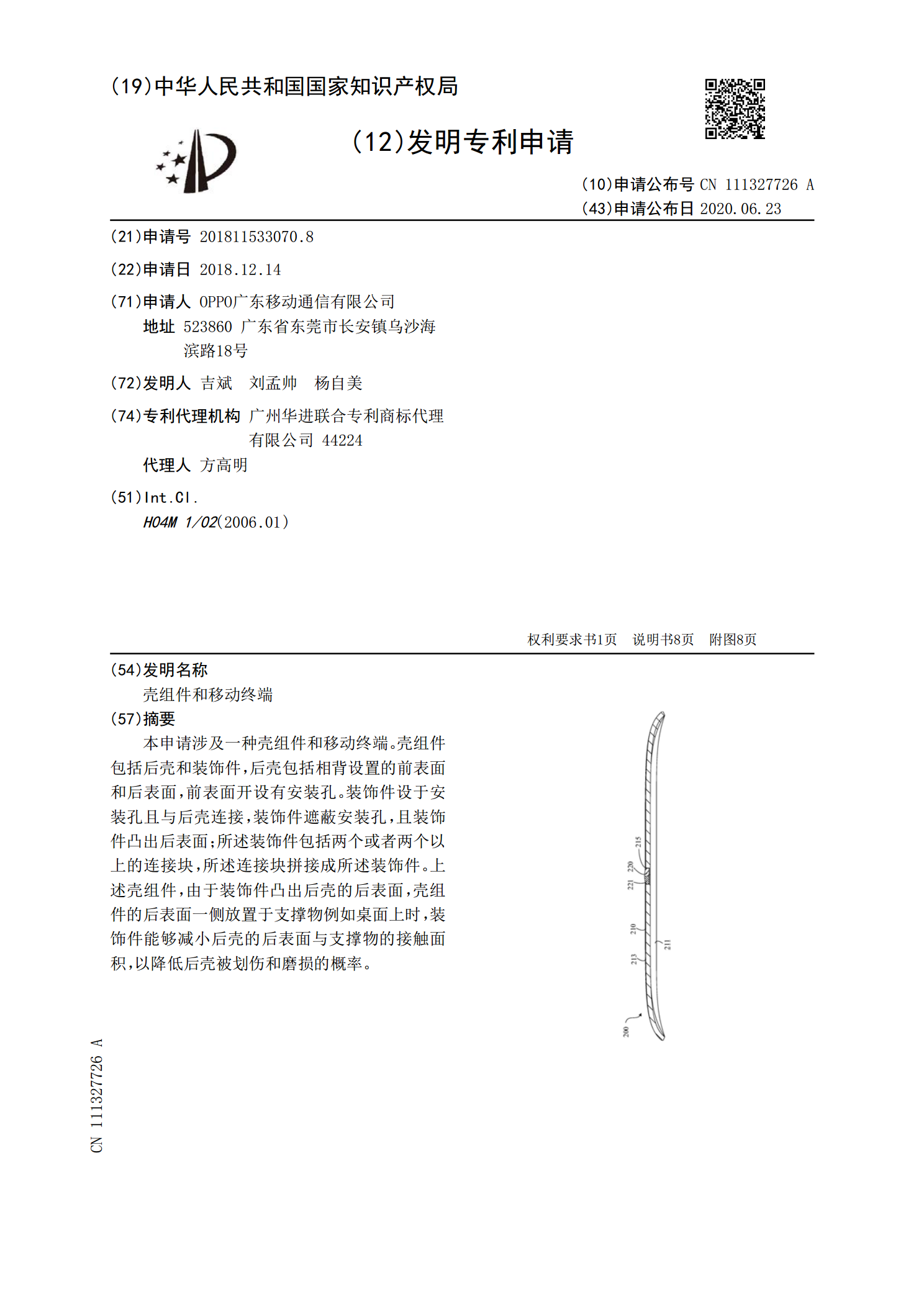
本申请涉及一种壳组件和移动终端。壳组件包括后壳和装饰件,后壳包括相背设置的前表面和后表面,前表面开设有安装孔。装饰件设于安装孔且与后壳连接,装饰件遮蔽安装孔,且装饰件凸出后表面;所述装饰件包括两个或者两个以上的连接块,所述连接块拼接成所述装饰件。上述壳组件,由于装饰件凸出后壳的后表面,壳组件的后表面一侧放置于支撑物例如桌面上时,装饰件能够减小后壳的后表面与支撑物的接触面积,以降低后壳被划伤和磨损的概率。

壳组件.pdf
一种用于涡轮风扇发动机的组件包括:第一壳部件,其包括尾部;和可平移壳部件,其包括构造成容纳在该尾部内的前部。可平移壳部件构造成能够相对于第一壳部件在第一操作位置(其中,前部容纳在第一壳部件的尾部内)与第二操作位置(其中,前部的比在第一操作位置中小的部分容纳在尾部内)之间移动。可平移壳部件构造成与涡轮风扇发动机的核心壳合作以限定具有排出喷嘴的风扇管的部分,并且可平移壳部件构造成限定在排出喷嘴附近的流控制位置,该流控制位置与控制风扇管区域相关。
测量方法和测量组件.pdf
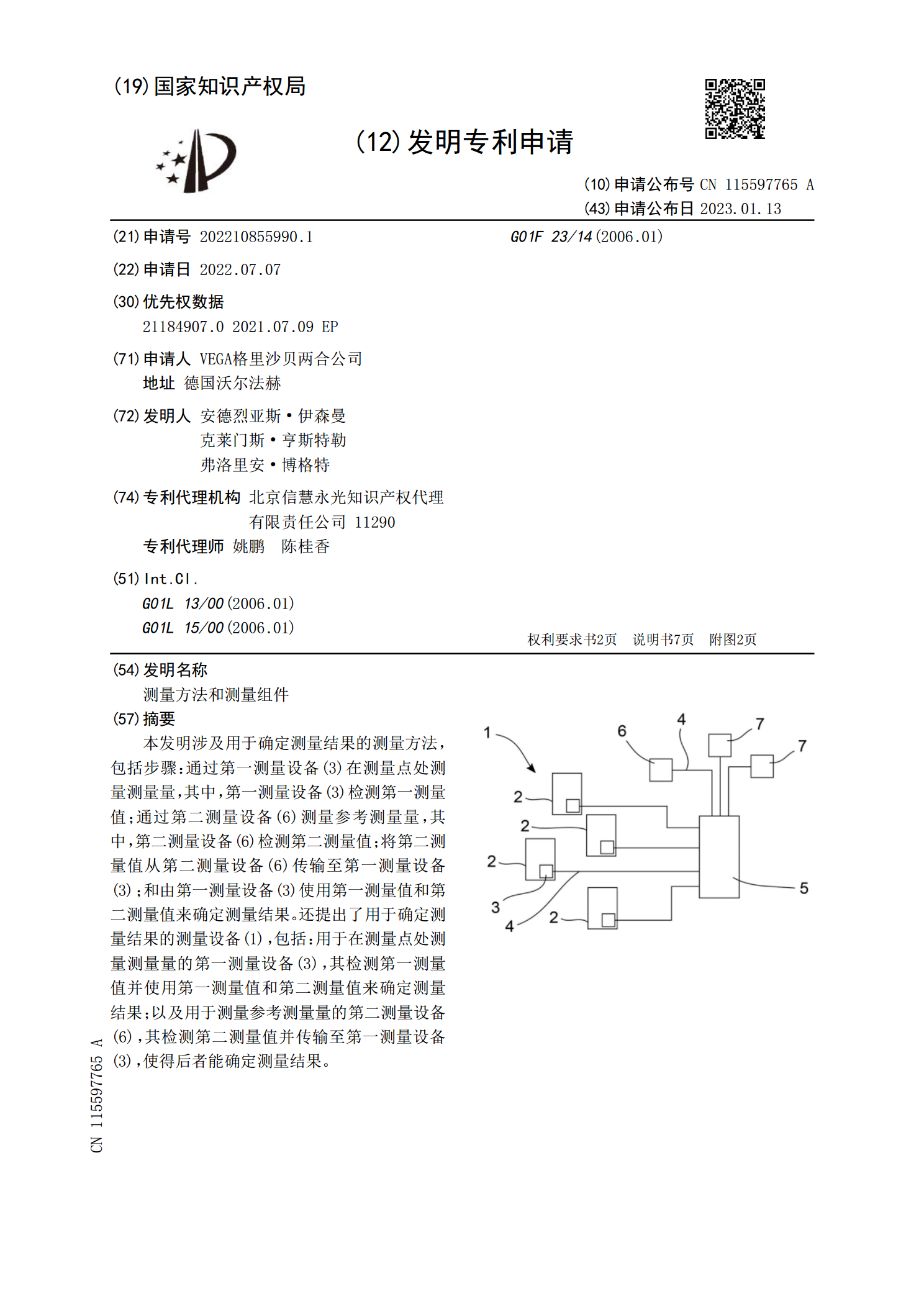
本发明涉及用于确定测量结果的测量方法,包括步骤:通过第一测量设备(3)在测量点处测量测量量,其中,第一测量设备(3)检测第一测量值;通过第二测量设备(6)测量参考测量量,其中,第二测量设备(6)检测第二测量值;将第二测量值从第二测量设备(6)传输至第一测量设备(3);和由第一测量设备(3)使用第一测量值和第二测量值来确定测量结果。还提出了用于确定测量结果的测量设备(1),包括:用于在测量点处测量测量量的第一测量设备(3),其检测第一测量值并使用第一测量值和第二测量值来确定测量结果;以及用于测量参考测量量的
后壳组件及显示装置.pdf
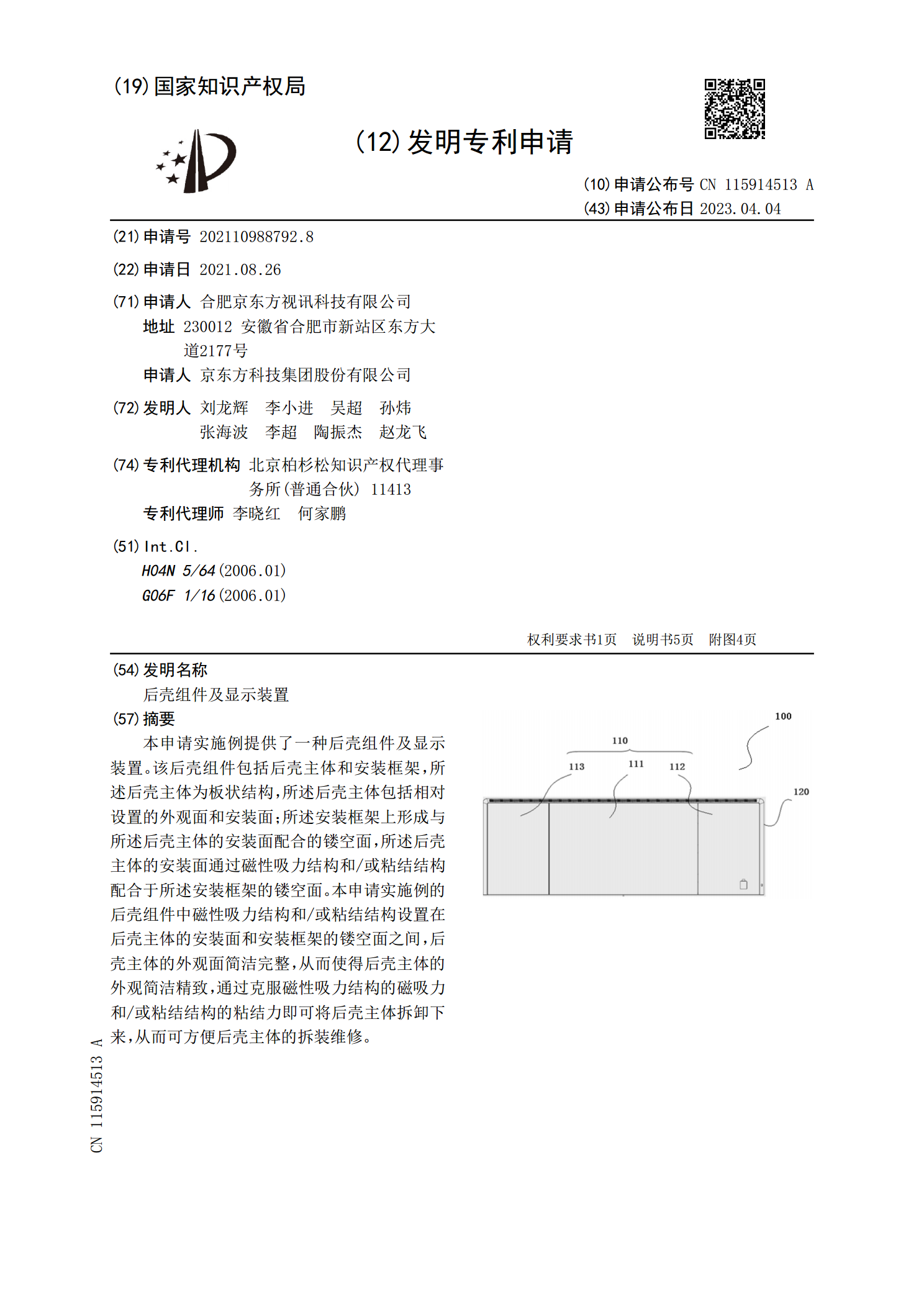
本申请实施例提供了一种后壳组件及显示装置。该后壳组件包括后壳主体和安装框架,所述后壳主体为板状结构,所述后壳主体包括相对设置的外观面和安装面;所述安装框架上形成与所述后壳主体的安装面配合的镂空面,所述后壳主体的安装面通过磁性吸力结构和/或粘结结构配合于所述安装框架的镂空面。本申请实施例的后壳组件中磁性吸力结构和/或粘结结构设置在后壳主体的安装面和安装框架的镂空面之间,后壳主体的外观面简洁完整,从而使得后壳主体的外观简洁精致,通过克服磁性吸力结构的磁吸力和/或粘结结构的粘结力即可将后壳主体拆卸下来,从而可方