
一种双臂搬运机械手.pdf

思洁****爱吗


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种双臂搬运机械手.pdf
本发明提供了一种双臂搬运机械手,包括底座、腰座、机械臂和末端构件;所述腰座可升降和旋转地安装在底座上;机械臂的一端旋转连接在腰座上,另一端旋转连接末端构件;所述腰座内部固定有电机、减速机和轴组件,机械臂的根部通过轴承安装在轴组件上。本发明的双臂搬运机械手,通过将以往设计中机械臂的大臂根部的减速机放置在腰座的其他位置,大臂不直接与减速机连接,而是通过至少两组轴承和轴组件安装在腰座上,减速机通过驱动带轮和同步带间接驱动大臂转动。利用轴承代替减速机承受重力弯矩,又通过增加轴承的间距,进一步提高了机械手的抗弯力臂

1、双臂式搬运机械手结构设计.docx
双臂式搬运机械手结构设计摘要为实现在自动化生产线中托盘的搬运,以及在零件转运过程中的生产效率的提高,研究一种仿人双臂式搬运机械手,与输送机一起配合加工,构成自动化加工单元,实现加工过程(上料、加工、下料)的自动化与无人化。从设计目标出发,提出机械手的总体设计方案,进行了机械手的细化设计,选择关键机构和关键元件,最终机构在功能上既能实现托盘的自动抓取转运,又能实现同时两个不同零件的同时转运。关键词机械手;双臂;机构设计;托盘转运;自动化1引言机械手是在机械化,自动化生产过程中发展起来的一种新型装置[1,2]

1、双臂式搬运机械手结构设计.docx
双臂式搬运机械手结构设计摘要为实现在自动化生产线中托盘的搬运,以及在零件转运过程中的生产效率的提高,研究一种仿人双臂式搬运机械手,与输送机一起配合加工,构成自动化加工单元,实现加工过程(上料、加工、下料)的自动化与无人化。从设计目标出发,提出机械手的总体设计方案,进行了机械手的细化设计,选择关键机构和关键元件,最终机构在功能上既能实现托盘的自动抓取转运,又能实现同时两个不同零件的同时转运。关键词机械手;双臂;机构设计;托盘转运;自动化1引言机械手是在机械化,自动化生产过程中发展起来的一种新型装置[1,2]
双臂机械手.pdf
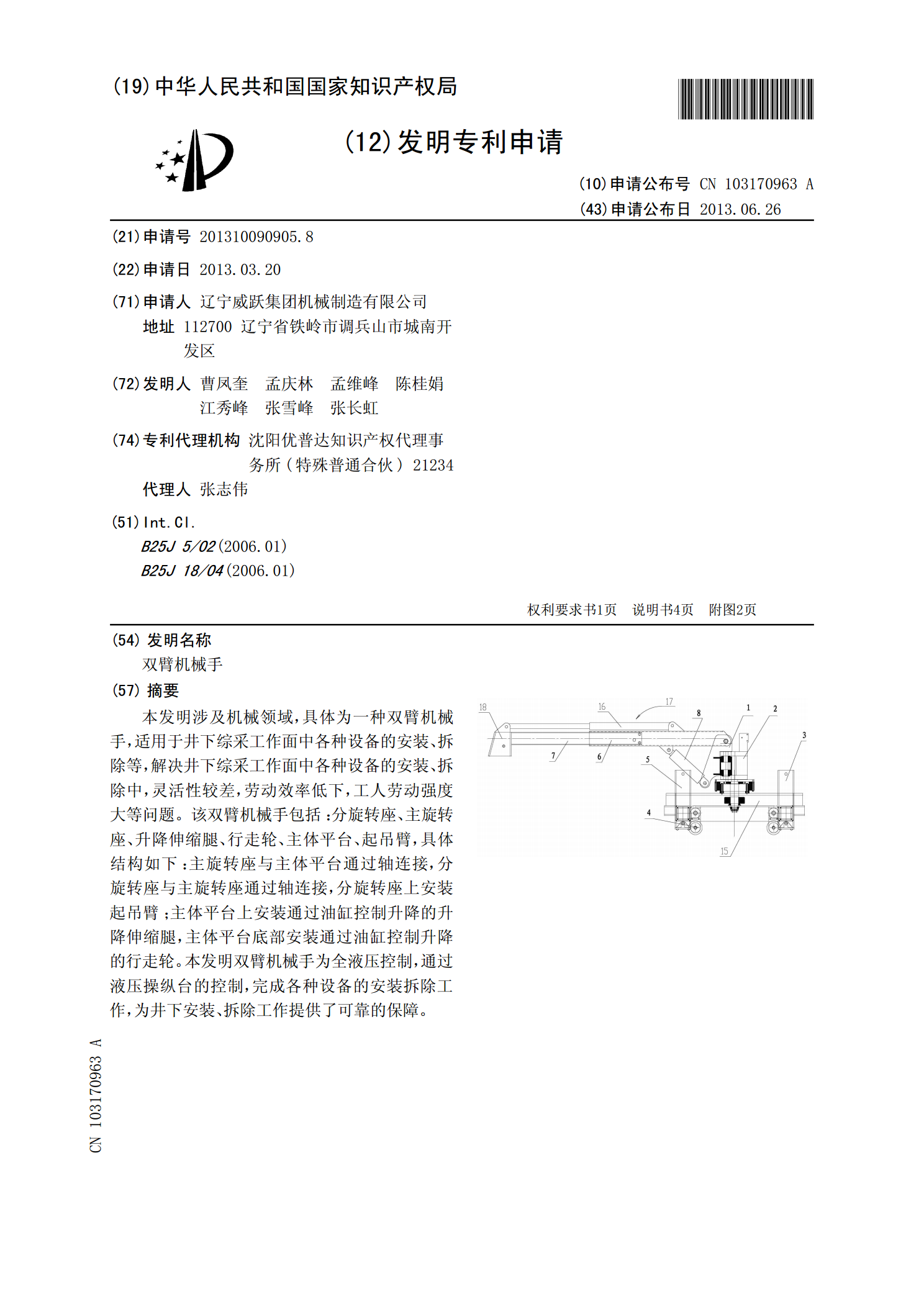
本发明涉及机械领域,具体为一种双臂机械手,适用于井下综采工作面中各种设备的安装、拆除等,解决井下综采工作面中各种设备的安装、拆除中,灵活性较差,劳动效率低下,工人劳动强度大等问题。该双臂机械手包括:分旋转座、主旋转座、升降伸缩腿、行走轮、主体平台、起吊臂,具体结构如下:主旋转座与主体平台通过轴连接,分旋转座与主旋转座通过轴连接,分旋转座上安装起吊臂;主体平台上安装通过油缸控制升降的升降伸缩腿,主体平台底部安装通过油缸控制升降的行走轮。本发明双臂机械手为全液压控制,通过液压操纵台的控制,完成各种设备的安装拆
一种注塑机双臂机械手.pdf
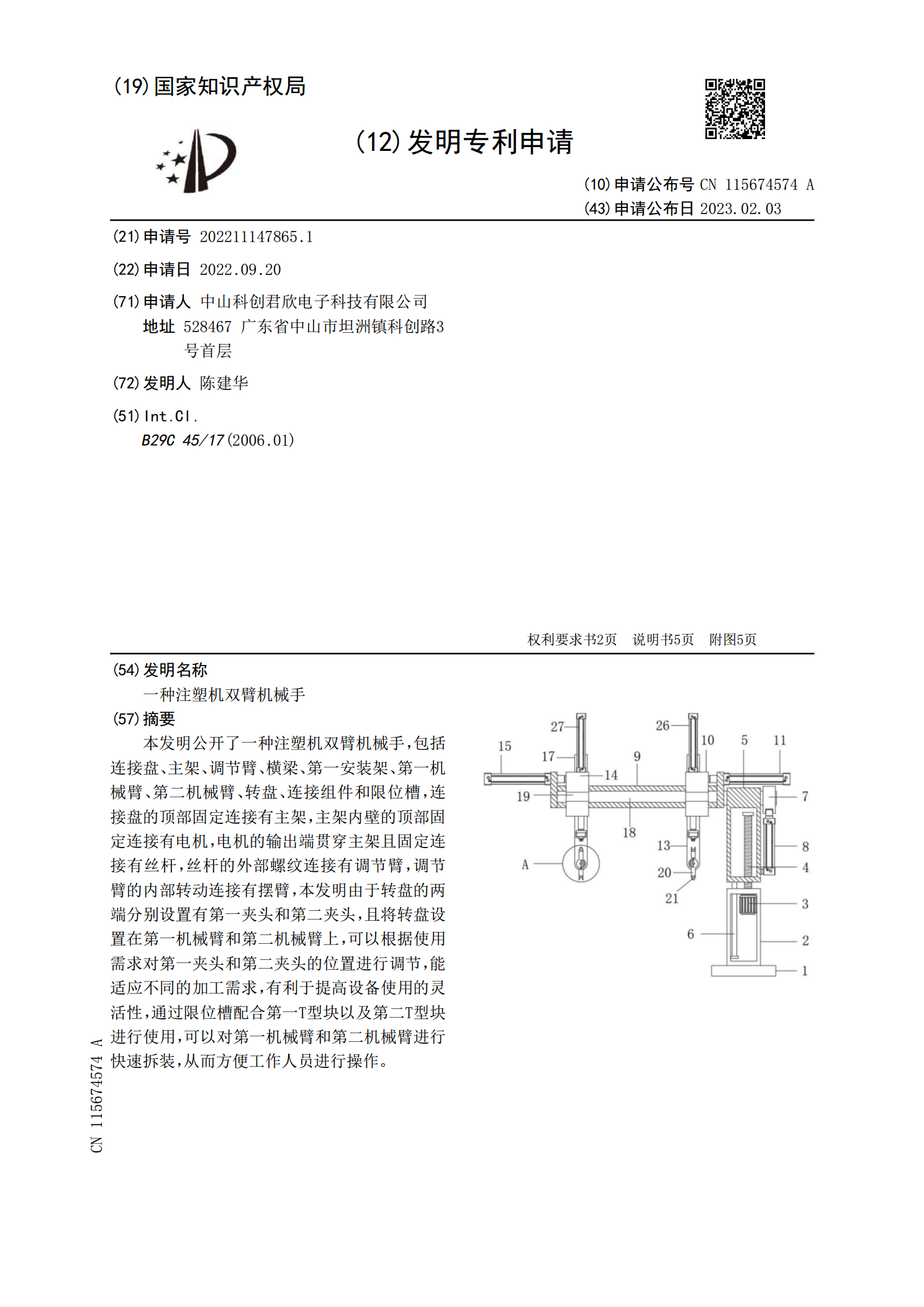
本发明公开了一种注塑机双臂机械手,包括连接盘、主架、调节臂、横梁、第一安装架、第一机械臂、第二机械臂、转盘、连接组件和限位槽,连接盘的顶部固定连接有主架,主架内壁的顶部固定连接有电机,电机的输出端贯穿主架且固定连接有丝杆,丝杆的外部螺纹连接有调节臂,调节臂的内部转动连接有摆臂,本发明由于转盘的两端分别设置有第一夹头和第二夹头,且将转盘设置在第一机械臂和第二机械臂上,可以根据使用需求对第一夹头和第二夹头的位置进行调节,能适应不同的加工需求,有利于提高设备使用的灵活性,通过限位槽配合第一T型块以及第二T型块进