
测量装置及其测量方法.pdf

是你****优呀


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

测量装置及其测量方法.pdf
本发明公开了一种测量装置,该测量装置包括主控单元、测量杆以及安装于测量杆上的测量单元,测量单元包括测距模块、第一电机和第二电机,第一电机驱动测距模块转动,第二电机驱动第一电机转动,主控单元控制第一电机和第二电机的转动、收集并处理测距模块测得的数据,还提供了一种测量方法。本发明测量装置能够方便的测知预测物的三维轮廓,受预测物的分布情况、体积大小以及形状影响小,并且本测量装置结构简单,拆装方便,很适合用于大型堆积物的三维轮廓的获知,特别适用于临时放置的堆积物。
玻璃轮廓测量装置及其测量方法.pdf
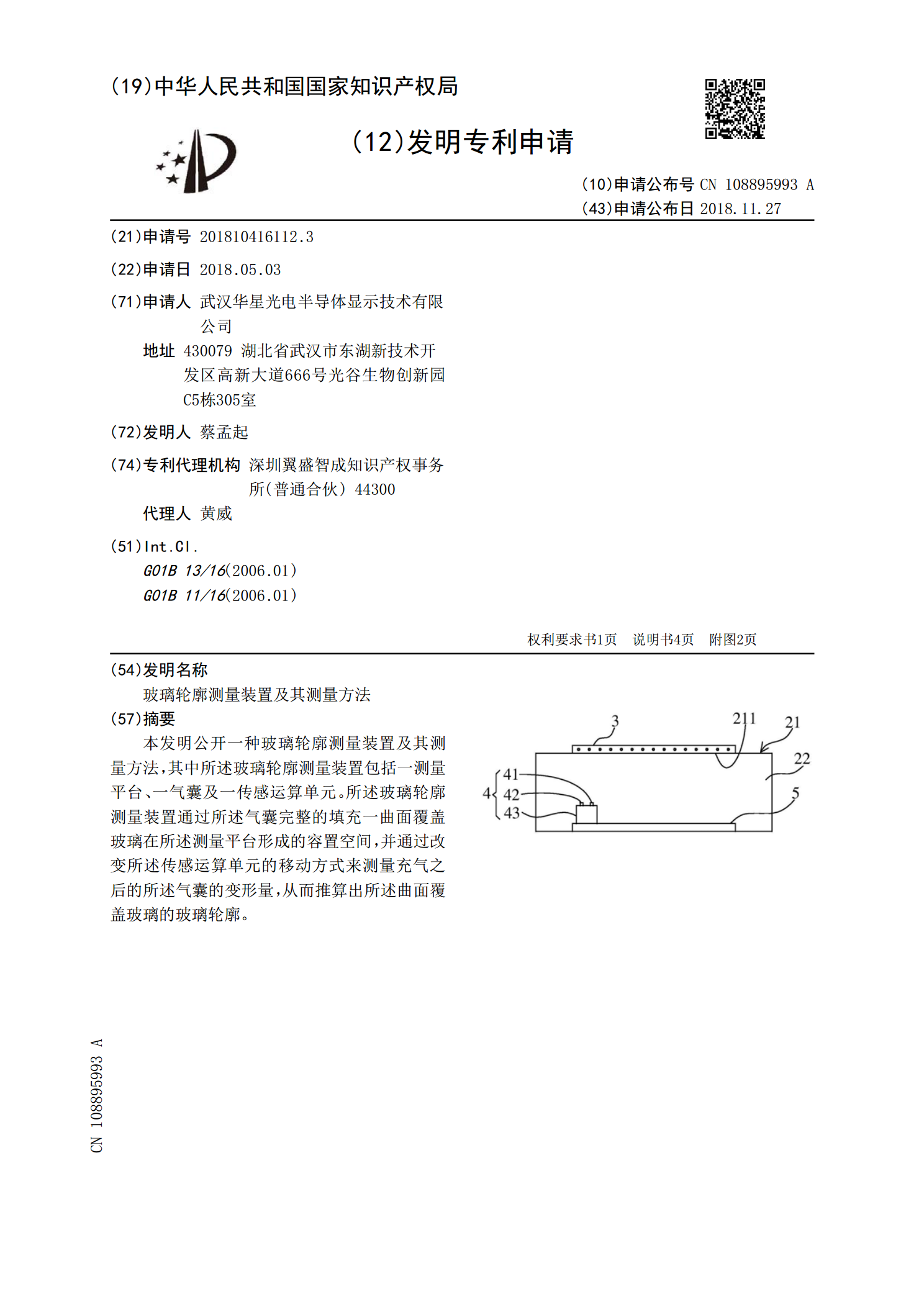
本发明公开一种玻璃轮廓测量装置及其测量方法,其中所述玻璃轮廓测量装置包括一测量平台、一气囊及一传感运算单元。所述玻璃轮廓测量装置通过所述气囊完整的填充一曲面覆盖玻璃在所述测量平台形成的容置空间,并通过改变所述传感运算单元的移动方式来测量充气之后的所述气囊的变形量,从而推算出所述曲面覆盖玻璃的玻璃轮廓。
高度差测量装置及其测量方法.pdf
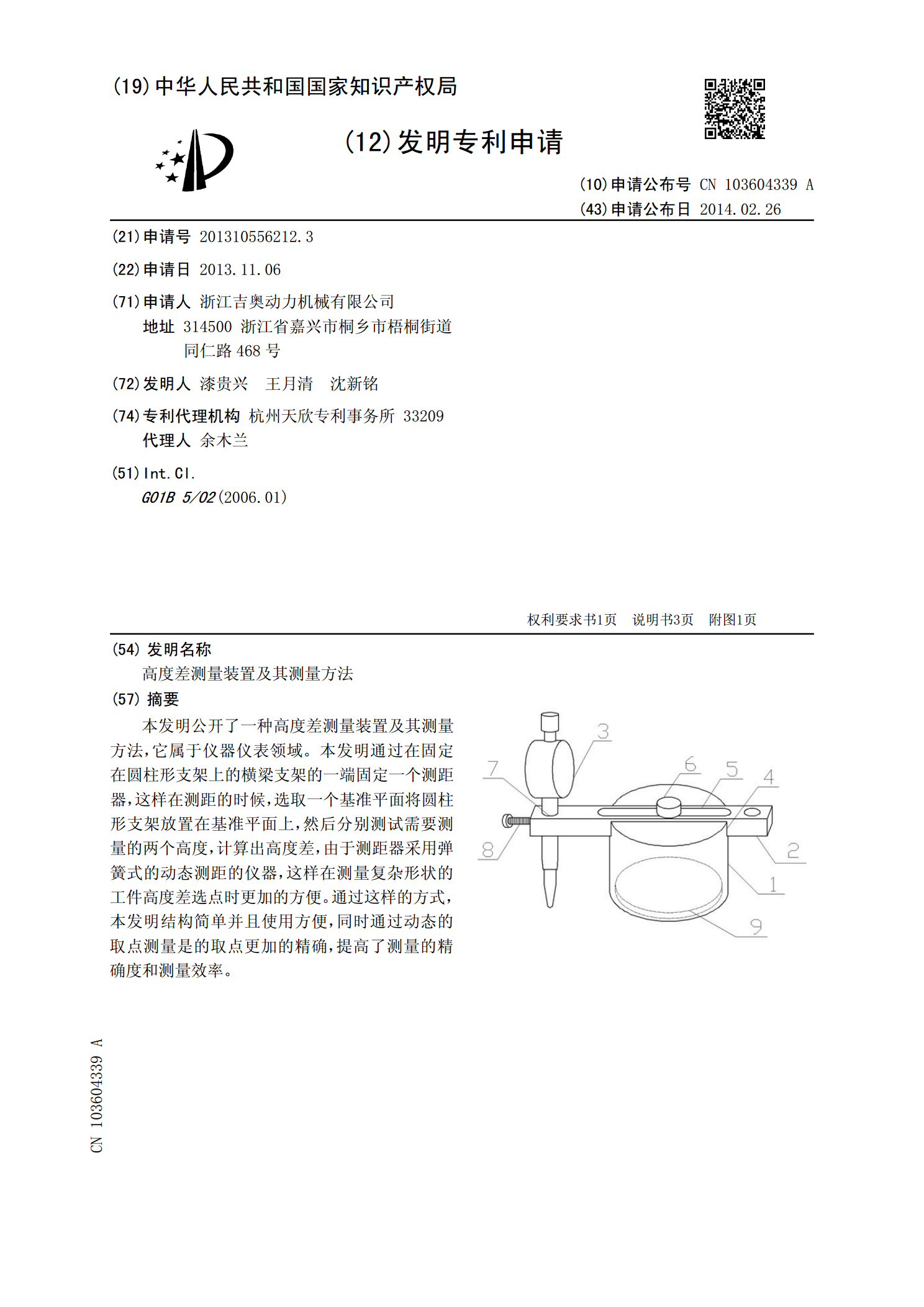
本发明公开了一种高度差测量装置及其测量方法,它属于仪器仪表领域。本发明通过在固定在圆柱形支架上的横梁支架的一端固定一个测距器,这样在测距的时候,选取一个基准平面将圆柱形支架放置在基准平面上,然后分别测试需要测量的两个高度,计算出高度差,由于测距器采用弹簧式的动态测距的仪器,这样在测量复杂形状的工件高度差选点时更加的方便。通过这样的方式,本发明结构简单并且使用方便,同时通过动态的取点测量是的取点更加的精确,提高了测量的精确度和测量效率。

穆勒矩阵测量装置及其测量方法.pdf
本发明涉及一种穆勒矩阵的测量装置及其测量方法。穆勒矩阵的测量装置,包括起偏光路、检偏光路和传递光路,传递光路包括分光组件、第一透镜组、小孔光阑和平面反射镜。待检测光学系统放置在传递光路中的小孔光阑和平面反射镜之间,并使得待检测光学系统的焦点与第一透镜组的焦点重合,平面反射镜的口径大于待测光学系统的有效通光口径。穆勒矩阵的测量装置通过增加传递光路来实现对大口径、非平面的复杂光学系统偏振特性的测量。在该测量装置及其测量方法中,采用普通口径的偏振光学元件即可实现大口径复杂光学系统偏振特性的测量。本发明的自准直光

叶片当量测量装置及其测量方法.pdf
本发明提供了一种叶片当量测量装置,包括底板、固定安装在底板上的固定装置、安装在底板上可移动的且与固定装置相对设置的移动装置及固定安装在固定装置和移动装置之间的用于安装叶片的支座;固定装置包括固定安装在底板上的固定测量台及固定安装在固定测量台上的两个固定百分表,两个固定百分表的表尖顶抵叶片的第一端面;移动装置包括可移动安装在底板上的移动测量台及固定安装在移动测量台上的两个移动百分表,两个移动百分表的表尖顶抵叶片的第二端面。根据本发明的另一方面,还提供了一种叶片当量测量方法,其包括上述叶片当量测量装置,包括以