
电动扳手.pdf

猫巷****傲柏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

电动扳手.pdf
电动扳手为实现打击功能,一般内置机械冲击组件。由于需要实现连续打击,对于机械冲击组件的精度和强度要求很高,且机械冲击组件在使用过程中容易积累机械疲劳和损伤,寿命较短。本发明提出一种电动扳手,包括依次连接的电机,传动机构和棘轮组件以及控制部件。传动机构具有空行程。棘轮组件接受传动机构传递的旋转扭矩并单向驱动其中的棘轮。控制部件与电机连接,其检测到电机堵转时则控制电机反转。本发明的电动扳手通过电子控制的方式实现打击功能,简化工具的机械结构,不但降低制造成本,而且延长工具的使用寿命。

电动扳手.pdf
一种电动扳手,包括壳体、动力部件、换向机构、支撑传动组件、开口齿轮、附件及弹性连接件,壳体包括相对设置的两个钳爪,两个钳爪之间形成有钳口,动力部件、换向机构、支撑传动组件及开口齿轮依次连接并容纳在壳体中,其中开口齿轮设置在安装部中且能够在安装部中转动,开口齿轮包括与支撑传动组件相啮合的外齿部、与钳口相对应的开口及与开口相通的收容部,附件能够止转地安装在收容部中,收容部上设置有容纳槽,附件的外侧壁设有与容纳槽对应的收容槽,开口齿轮上设有与容纳槽相通的限位部,弹性连接件的一端上对应的设置有限位端,限位端安装在

电动扳手.pdf
一种电动扳手,包括壳体、动力部件、换向机构、支撑传动组件、开口齿轮、主控制组件及复位组件,壳体包括相对设置的两个钳爪,两个钳爪之间形成有钳口,动力部件、换向机构、支撑传动组件及开口齿轮依次连接并容纳在壳体中,开口齿轮包括外齿部、开口及与开口相通的驱动部,与螺纹件配合的管状物件可通过钳口进入到开口齿轮中,复位组件包括标识部、用于感应所述标识部位置的传感器、控制电路板、复位开关及一个复位开关拨扭;复位开关触发时,当所述传感器感应到标识部,即产生一个电信号传递到控制电路板,控制电路板控制电动扳手以使其停止转动,

电动扳手.pdf
一种电动扳手,包括壳体、动力部件、棘轮机构、支撑传动组件及开口齿轮,所述壳体的一端形成有安装部,所述动力部件、棘轮机构、支撑传动组件及开口齿轮依次连接并容纳在所述的壳体中,螺纹件穿过所述安装部以到达所述开口齿轮中,所述的支撑传动组件与开口齿轮相连并带动开口齿轮转动,从而实现螺纹件的拧紧或旋松。本发明的电动扳手在一些螺栓过长的情况下,拧带管道的螺母时,或操作空间较狭窄等情况下都能方便的使用,以棘轮机构作为换向传动机构,由电机提供动力,在使用过程中,只需将螺纹件放入开口齿轮的套筒中然后启动本发明的动力钳口扳手
电动扳手.pdf
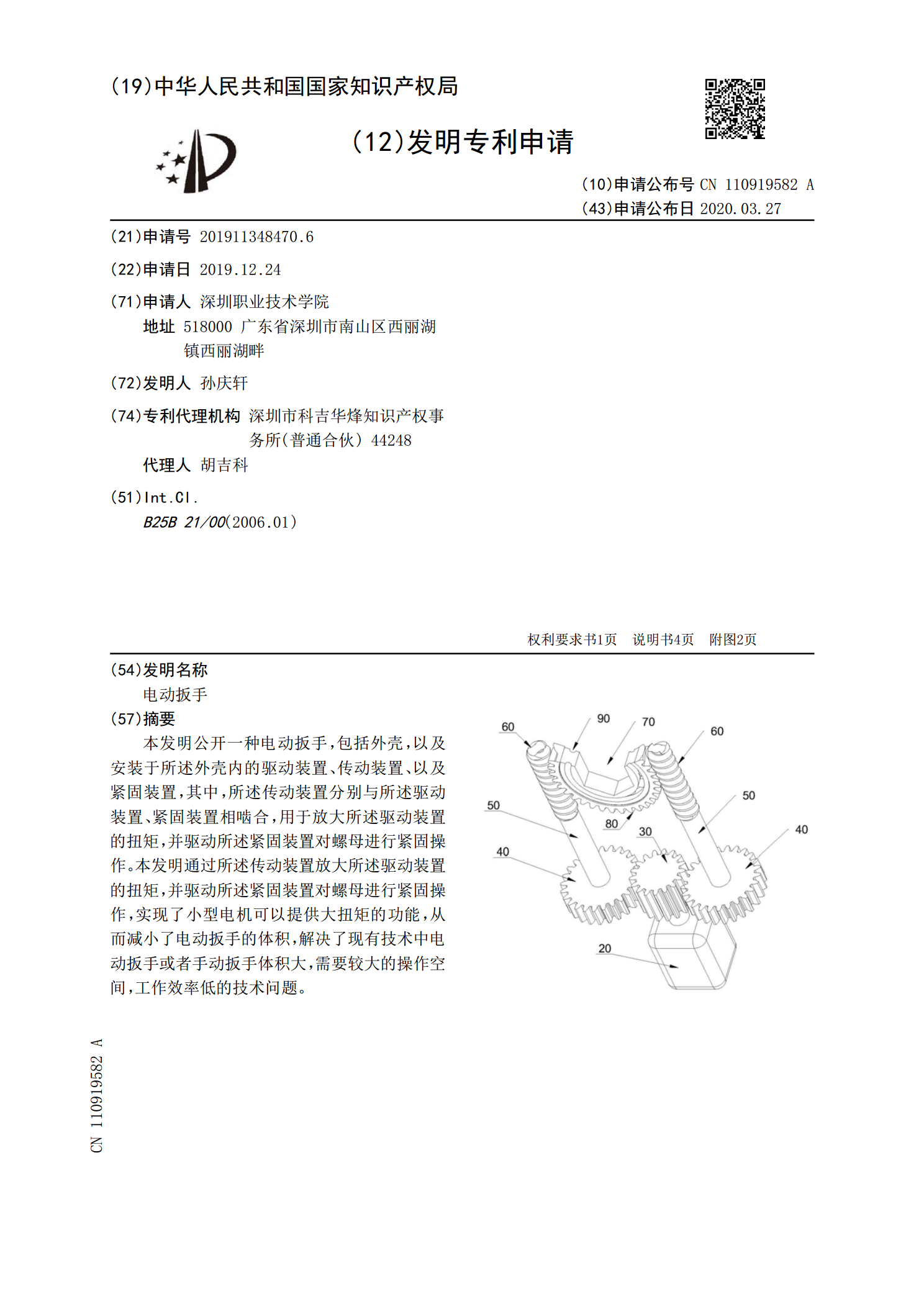
本发明公开一种电动扳手,包括外壳,以及安装于所述外壳内的驱动装置、传动装置、以及紧固装置,其中,所述传动装置分别与所述驱动装置、紧固装置相啮合,用于放大所述驱动装置的扭矩,并驱动所述紧固装置对螺母进行紧固操作。本发明通过所述传动装置放大所述驱动装置的扭矩,并驱动所述紧固装置对螺母进行紧固操作,实现了小型电机可以提供大扭矩的功能,从而减小了电动扳手的体积,解决了现有技术中电动扳手或者手动扳手体积大,需要较大的操作空间,工作效率低的技术问题。