
磁悬浮储能飞轮的磁轴承控制电路及其控制方法.pdf

书生****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

磁悬浮储能飞轮的磁轴承控制电路及其控制方法.pdf
一种磁悬浮储能飞轮的磁轴承电控电路及其控制量计算方法,包括五路位移传感器接口、五路电流传感器接口、信号调理电路、二级滤波电路、DSP控制单元和功放驱动电路,在每路位移传感器接口和信号调理电路之间,每路位移传感器接口通过电阻与大地连接;同时在二级滤波电路与DSP控制单元的A/D接口之间,每路连接信号通过电阻与大地连接;在DSP控制单元对五路转子位移传感器信号经PID运算,然后再进行一次二级数字低通滤波,最后经过交叉运算后,与五路电流传感器信号比例运算后求和,形成PWM波调制信号,输入功放驱动电路控制磁悬浮储
基于磁悬浮轴承的飞轮储能装置的启停控制方法及装置.pdf
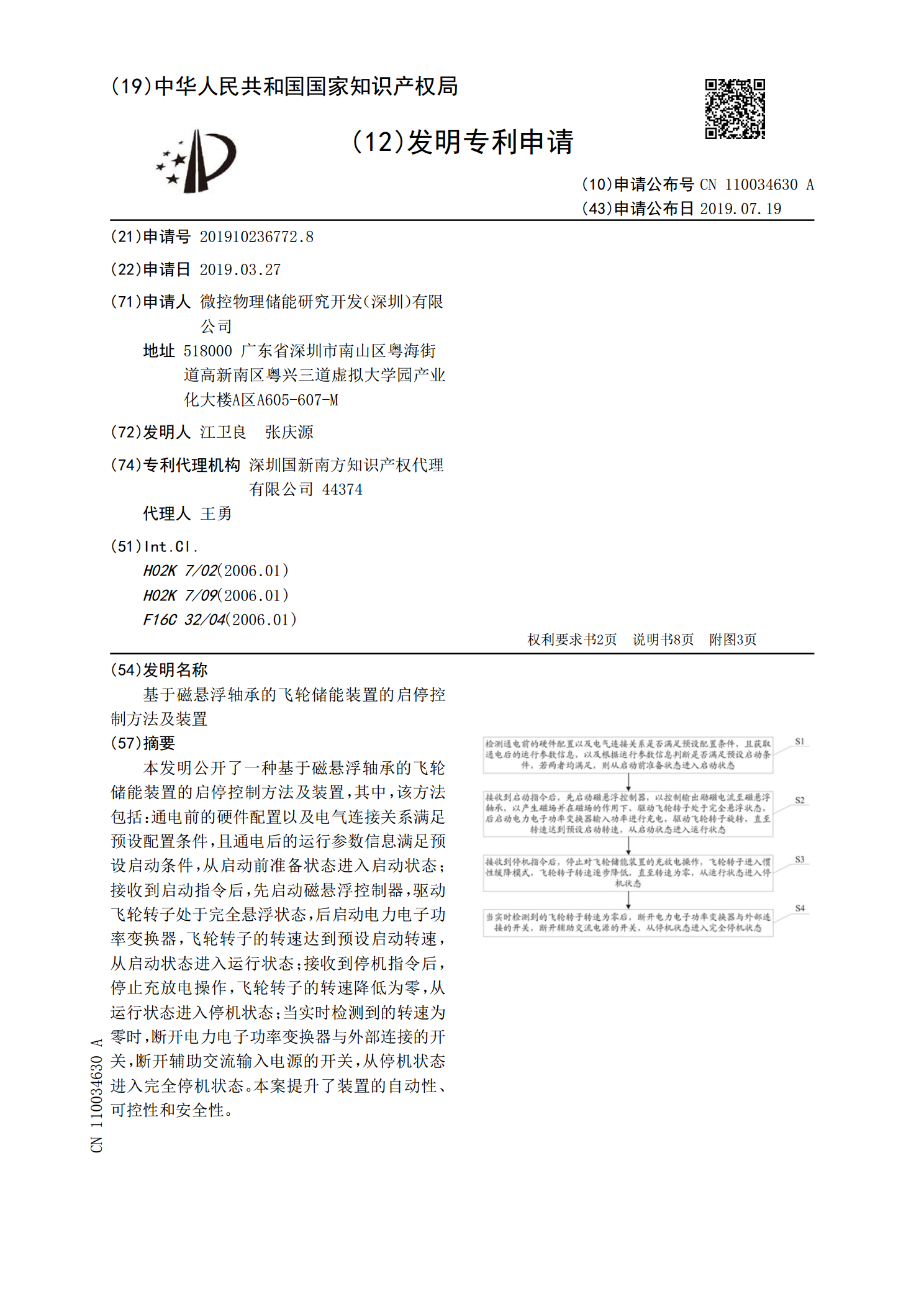
本发明公开了一种基于磁悬浮轴承的飞轮储能装置的启停控制方法及装置,其中,该方法包括:通电前的硬件配置以及电气连接关系满足预设配置条件,且通电后的运行参数信息满足预设启动条件,从启动前准备状态进入启动状态;接收到启动指令后,先启动磁悬浮控制器,驱动飞轮转子处于完全悬浮状态,后启动电力电子功率变换器,飞轮转子的转速达到预设启动转速,从启动状态进入运行状态;接收到停机指令后,停止充放电操作,飞轮转子的转速降低为零,从运行状态进入停机状态;当实时检测到的转速为零时,断开电力电子功率变换器与外部连接的开关,断开辅助

飞轮储能电池磁悬浮轴承控制研究的开题报告.docx
飞轮储能电池磁悬浮轴承控制研究的开题报告一、选题背景及意义随着全球能源消耗的增长,人们对于可再生能源(如风能、光能等)的需求也在不断增加。其中,风力发电已成为世界各国发展可再生能源的重要手段之一。然而,风力发电存在稳定性不足、难以调节输出等问题,这限制了其在电力系统中的应用。因此,如何提高风力发电系统的稳定性和产能,成为了一个研究的热点。飞轮储能技术具有在短时间内储存和释放大量电能的能力,因此可以作为风力发电系统的一种辅助储能方式。飞轮储能电池具有响应快、寿命长、效率高等优点,但其转子的高速运转也带来轴承

适应于飞轮储能系统的主动磁悬浮轴承专家控制方法研究.docx
适应于飞轮储能系统的主动磁悬浮轴承专家控制方法研究随着能源需求的不断增加和可再生能源技术的快速发展,飞轮储能系统作为一种高效、可靠的能量储存设备,受到越来越广泛的关注。而磁悬浮轴承作为飞轮储能系统的关键组成部分,对于飞轮储能系统的性能和可靠性具有重要影响。因此,如何实现飞轮储能系统的高效运行,成为当前研究的热点和难点之一。本文将针对适应于飞轮储能系统的主动磁悬浮轴承专家控制方法进行研究,并从技术原理、控制策略、实验效果等方面进行探讨。首先,我们将简要介绍飞轮储能系统和磁悬浮轴承的工作原理,为后续讨论打下基

磁悬浮飞轮储能装置及其故障诊断方法.pdf
本发明的目的在于提供磁悬浮飞轮储能装置及其故障诊断方法,包括密封舱体和安装在密封舱体里的飞轮,密封舱体里设置上机械轴承基座和下机械轴承基座,上机械轴承基座里安装上机械轴承,下机械轴承基座安装下机械轴承,飞轮通过飞轮的飞轮轴安装在上机械轴承和下机械轴承上,在上机械轴承和飞轮之间安装轴向磁轴承,在下机械轴承和飞轮之间安装电动发电一体机。本发明具有多部件实时故障诊断能力,基于信息融合的故障诊断方法准确率高,运行过程的能量损耗低,且具有被动容错能力。