
多旋转绝对旋转角检测装置以及检测绝对旋转角的方法.pdf

St****36


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

多旋转绝对旋转角检测装置以及检测绝对旋转角的方法.pdf
本发明提供一种多旋转绝对旋转角检测装置及检测绝对旋转角的方法,为检测出主轴(10a)的旋转角度,而使用N倍角旋转变压器检测器(RS0),并且,为检测出第一~第三副轴(11b~13b)的旋转角度,而使用1倍角旋转变压器检测器(RS1~RS3),从而得到较宽的多旋转检测范围,并且还能实现较高的检测精度。本检测装置由具备与主轴齿轮(10b)进行齿轮接合的第一~第三副轴齿轮的齿轮机构(1)构成,主轴齿轮与第一副轴齿轮的齿数差为2或超过2的整数a,而主轴齿轮与第二副轴齿轮的齿数差为1,第一轴的齿数具有是相对于主轴的

检测多旋转绝对旋转角的装置以及检测该旋转角的方法.pdf
本发明提供一种高精度地计算与电动机输出轴相连的电动机转轴的多旋转绝对旋转角的方法。本发明的旋转角检测装置的特征在于,电动机转轴的旋转角θ1相对于第n转轴的旋转角θn满足θn=(-(m±1)/m)n-1×θ1的关系。作为实现满足该关系的机构的实施例,旋转角检测装置在第1转轴至第n转轴的相邻转轴之间,形成有使齿数为(m±1)的齿轮与齿数为m的齿轮相咬合的齿轮机构。将第1转轴的多旋转角度展开为第1转轴的旋转角度、即第1转轴的检测值p1及与第1转轴的旋转数相对应的R0×m0+R1×m1+…Rn-2×mn-2,并基

多旋转绝对型旋转角检测装置以及齿轮.pdf
本发明提供一种多旋转绝对型旋转角检测装置。编码器装置(10)具有由使光透过的透过性树脂形成并形成有用于在一转的范围内检测绝对旋转角的光学图案(LP)的被检测体(15)、设置于该被检测体(15)的外周的多个齿(17),第一传感器(20)具有向被检测体(15)照射光的光照射部(36)、接收透过了被检测体(15)的光的受光部(38)。

多旋转角度检测装置.pdf
本发明提供一种小型的多旋转角度检测装置。相对于包含在凸缘状的齿轮形成部(1a)上同心地形成有齿数不同的第一齿轮(11)以及第二齿轮(12)的转子的旋转轴(Y-Y)的平面,使具备磁铁(18)的第一从动齿轮(13)的旋转轴(X1-X1)和具备磁铁(19)的第二从动齿轮(14)的旋转轴(X2-X2)分别都正交地配置。
旋转角检测装置.pdf
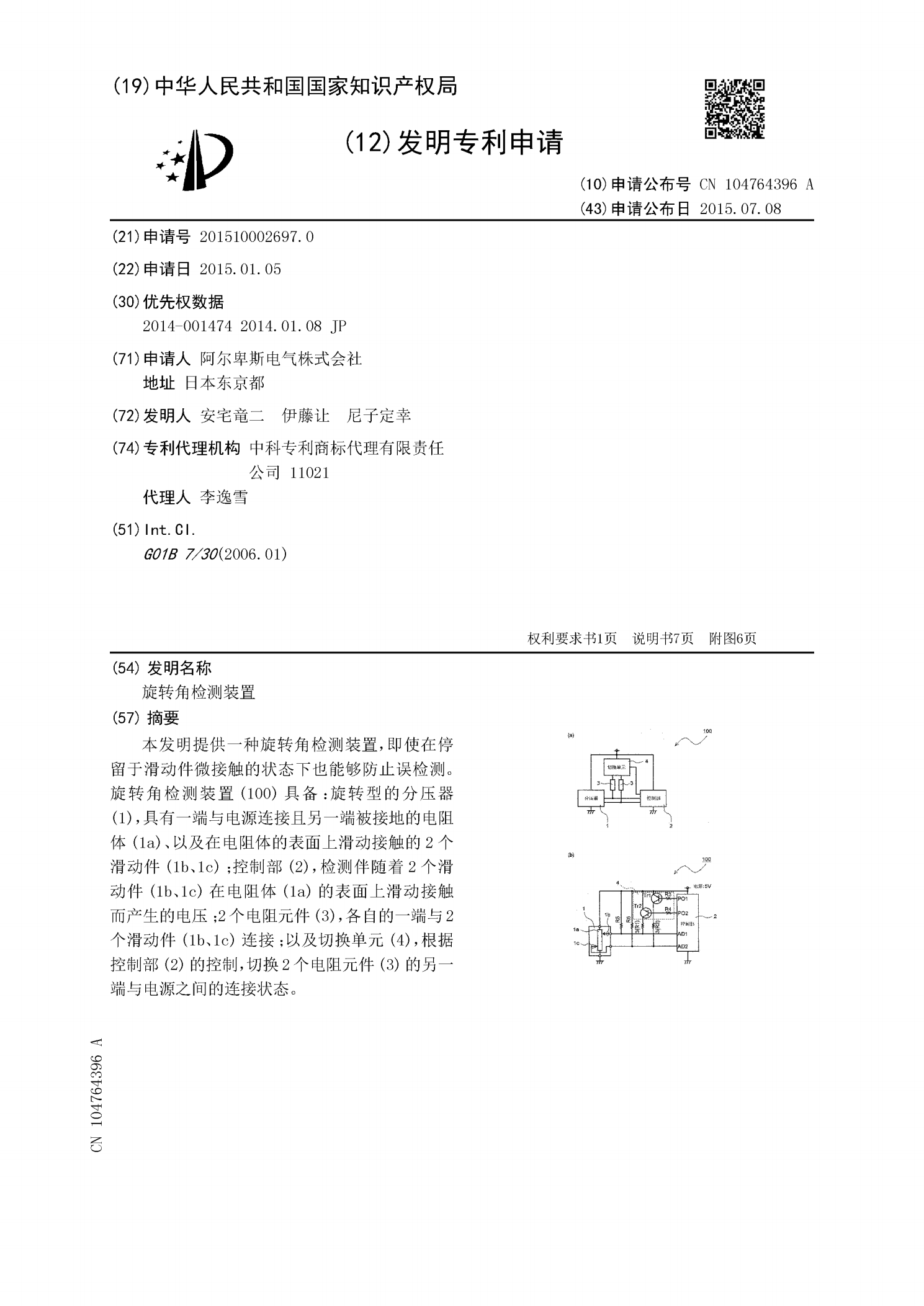
本发明提供一种旋转角检测装置,即使在停留于滑动件微接触的状态下也能够防止误检测。旋转角检测装置(100)具备:旋转型的分压器(1),具有一端与电源连接且另一端被接地的电阻体(1a)、以及在电阻体的表面上滑动接触的2个滑动件(1b、1c);控制部(2),检测伴随着2个滑动件(1b、1c)在电阻体(1a)的表面上滑动接触而产生的电压;2个电阻元件(3),各自的一端与2个滑动件(1b、1c)连接;以及切换单元(4),根据控制部(2)的控制,切换2个电阻元件(3)的另一端与电源之间的连接状态。