
伺服原理驱动器位置控制.ppt

ca****ng

1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

伺服原理驱动器位置控制.ppt
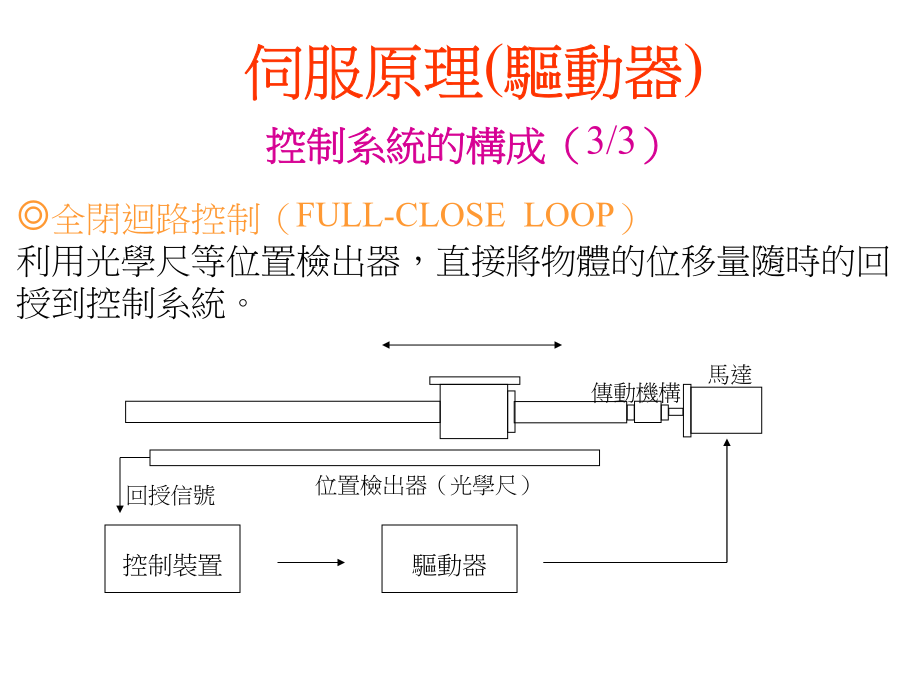
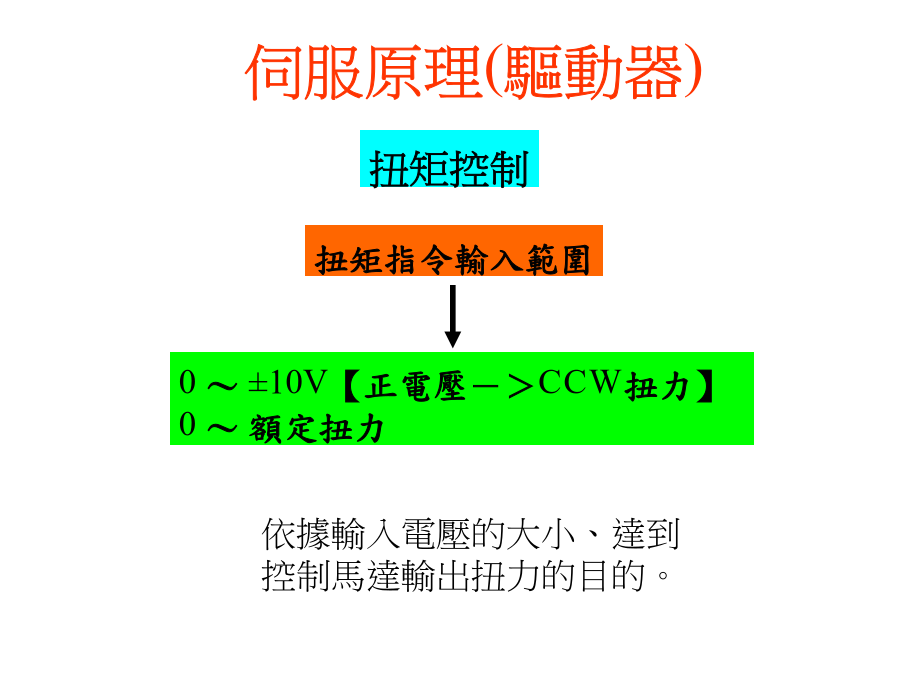
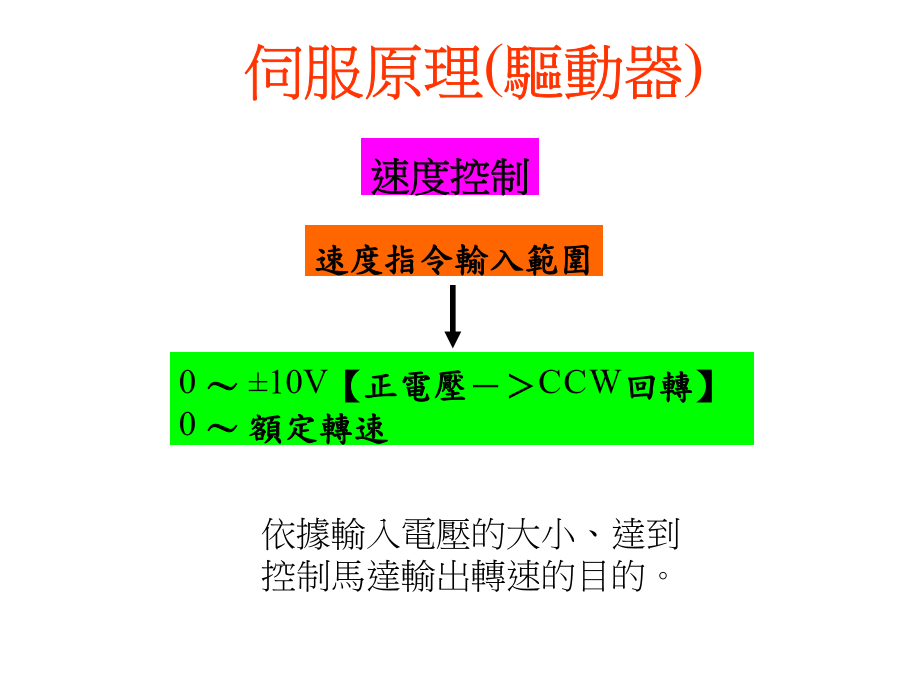
伺服原理(驅動器)3、速度LOOP此LOOP是用來檢測馬達的旋轉速度是否依照指令旋轉之用,相對於控制裝置所提供之指令,速度LOOP控制馬達的旋轉速度。4、位置LOOP此LOOP是用來檢測由控制器所輸出位置控制指令之後,伺服馬達是否移動至指令位置。相對於位置指令值,當檢測值過大或過小時,控制伺服馬達移動其誤差值的部份,達到定位之目的。伺服原理(驅動器)伺服原理(驅動器)伺服原理(驅動器)伺服原理(驅動器)扭矩指令輸入範圍伺服原理(驅動器)伺服原理(驅動器)伺服原理(驅動器)伺服原理(驅動器)伺服原理(驅動器
伺服驱动器的工作原理.pdf
伺服驱动器的工作原理伺服驱动器是现代自动化系统中常见的一种设备,它能够控制和驱动伺服电机的运动。伺服驱动器在许多领域都起到至关重要的作用,例如机械制造、自动化生产线、机器人技术等等。本文将深入探讨伺服驱动器的工作原理,帮助读者更好地理解这项技术。一、什么是伺服驱动器?伺服驱动器是一种电子设备,它通过接收输入信号,控制伺服电机的运动。伺服电机是一种精密的电动机,通过伺服驱动器的控制,可以实现高精度、高速度和高稳定性的运动。二、伺服驱动器的工作原理伺服驱动器的工作原理可以简单归纳为以下几个步骤:1.接收输入信
交流伺服驱动器原理及调试.ppt
精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt精选ppt

伺服驱动器原理及应用培训.ppt
一、电流环二、速度环三、位置环四、主回路五、动态制动六、再生七、伺服选型一、电流环一、电流环一、电流环一、电流环一、电流环二、速度环二、速度环三、位置环三、位置环三、位置环三、位置环三、位置环四、主回路四、主回路五、动态制动五、动态制动五、动态制动五、动态制动五、动态制动五、动态制动五、动态制动六、再生六、再生六、再生六、再生六、再生六、再生六、再生七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七

伺服驱动器原理及应用培训.ppt
一、电流环二、速度环三、位置环四、主回路五、动态制动六、再生七、伺服选型一、电流环一、电流环一、电流环一、电流环一、电流环二、速度环二、速度环三、位置环三、位置环三、位置环三、位置环三、位置环四、主回路四、主回路五、动态制动五、动态制动五、动态制动五、动态制动五、动态制动五、动态制动五、动态制动六、再生六、再生六、再生六、再生六、再生六、再生六、再生七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七、伺服选型七