
齿轮传动式可摆动平行连杆同步伸缩机构.pdf

瀚玥****魔王

1/6
2/6
3/6
4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

齿轮传动式可摆动平行连杆同步伸缩机构.pdf
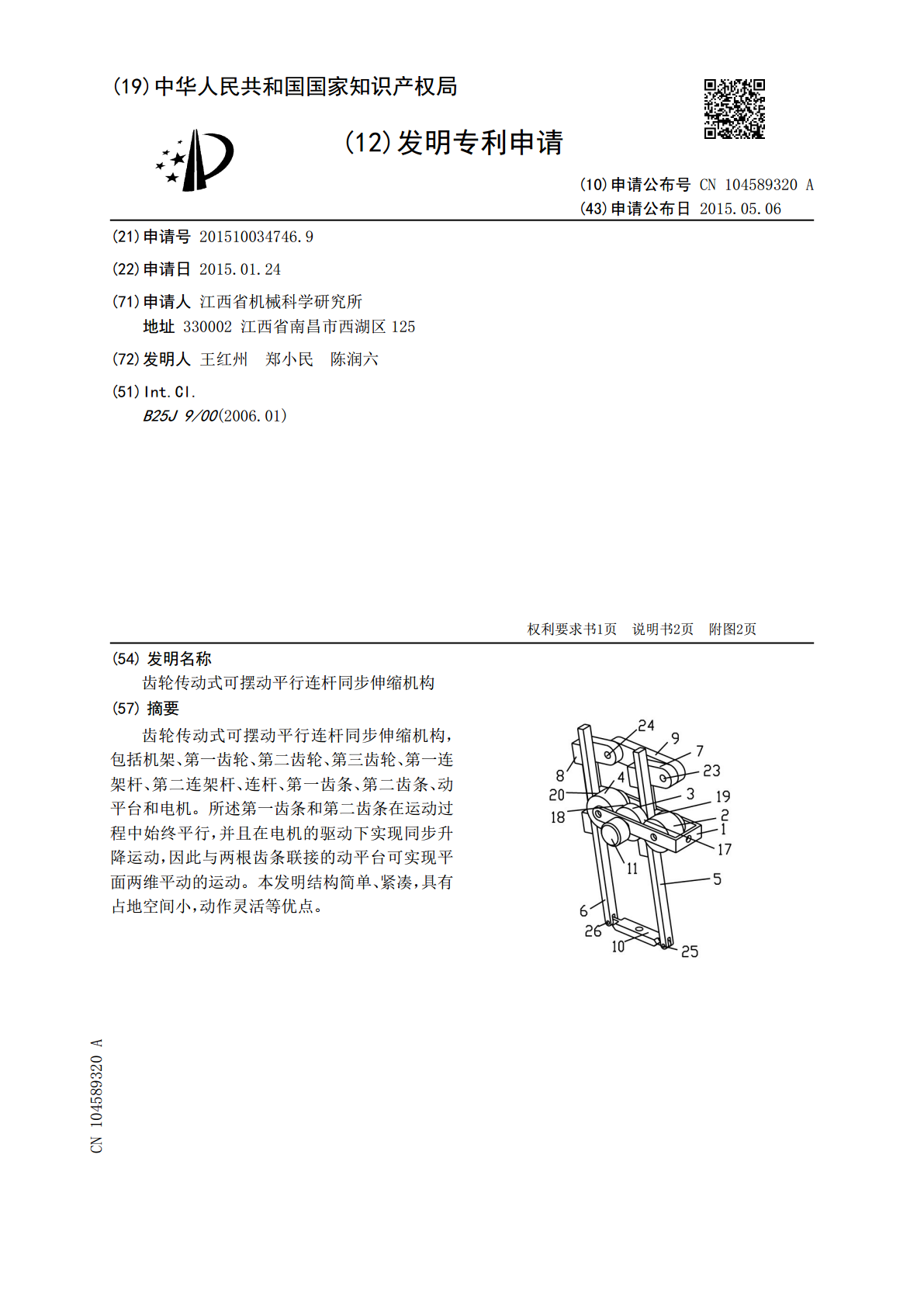
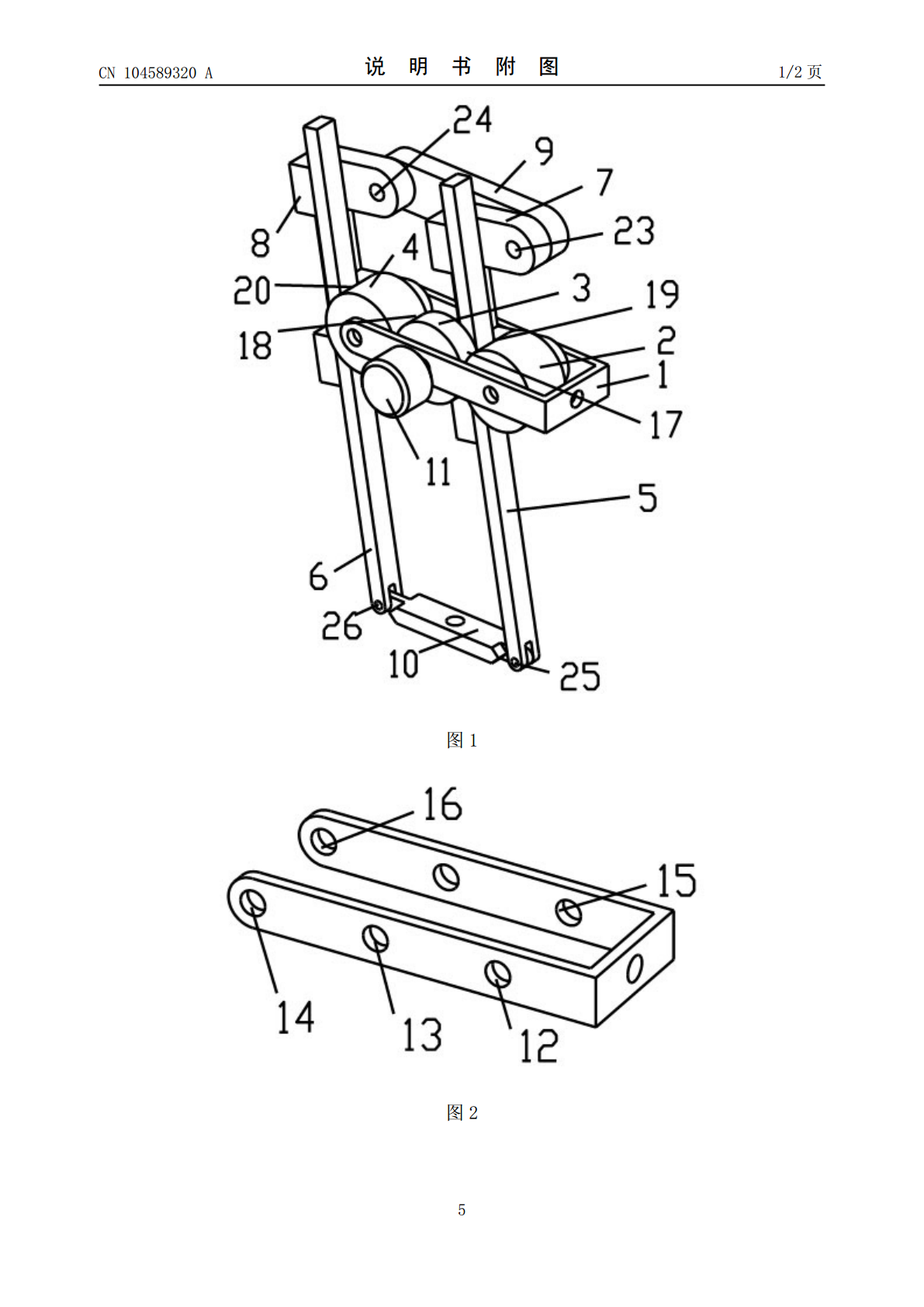
齿轮传动式可摆动平行连杆同步伸缩机构,包括机架、第一齿轮、第二齿轮、第三齿轮、第一连架杆、第二连架杆、连杆、第一齿条、第二齿条、动平台和电机。所述第一齿条和第二齿条在运动过程中始终平行,并且在电机的驱动下实现同步升降运动,因此与两根齿条联接的动平台可实现平面两维平动的运动。本发明结构简单、紧凑,具有占地空间小,动作灵活等优点。

带传动式可摆动平行连杆同步伸缩机构.pdf
带传动式可摆动平行连杆同步伸缩机构,包括机架、第一传动轮、第二传动轮、第一连架杆、第二连架杆、连杆、第一齿条、第二齿条、动平台、电机和带。所述第一齿条和第二齿条在运动过程中始终平行,并且在电机的驱动下实现同步升降运动,因此与两根齿条联接的动平台可实现平面两维平动的运动。本发明结构简单、紧凑,具有占地空间小,动作灵活等优点。
齿轮传动式可摆动平行电动缸同步伸缩机构.pdf
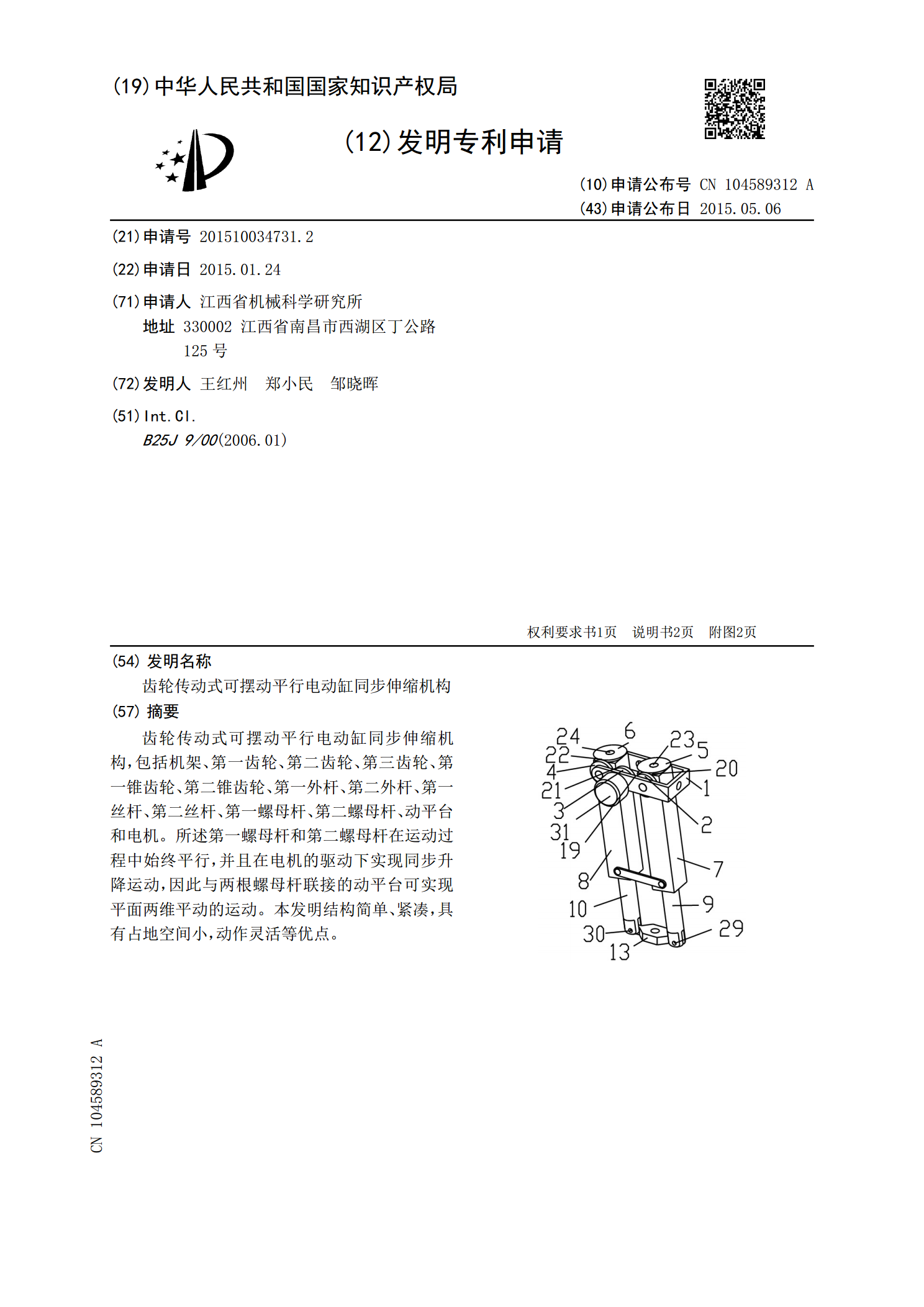
齿轮传动式可摆动平行电动缸同步伸缩机构,包括机架、第一齿轮、第二齿轮、第三齿轮、第一锥齿轮、第二锥齿轮、第一外杆、第二外杆、第一丝杆、第二丝杆、第一螺母杆、第二螺母杆、动平台和电机。所述第一螺母杆和第二螺母杆在运动过程中始终平行,并且在电机的驱动下实现同步升降运动,因此与两根螺母杆联接的动平台可实现平面两维平动的运动。本发明结构简单、紧凑,具有占地空间小,动作灵活等优点。
带传动式可摆动平行电动缸同步伸缩机构.pdf
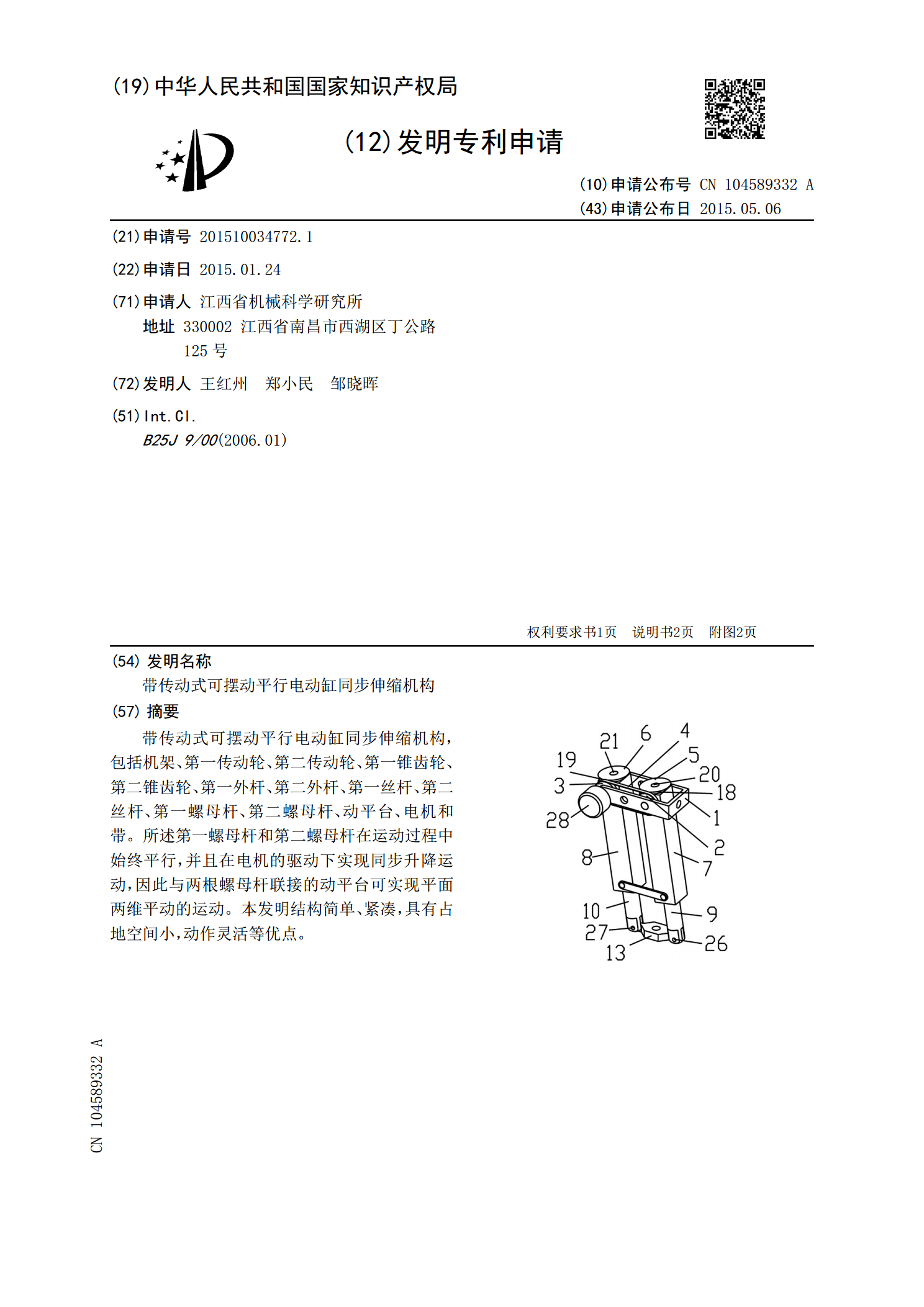
带传动式可摆动平行电动缸同步伸缩机构,包括机架、第一传动轮、第二传动轮、第一锥齿轮、第二锥齿轮、第一外杆、第二外杆、第一丝杆、第二丝杆、第一螺母杆、第二螺母杆、动平台、电机和带。所述第一螺母杆和第二螺母杆在运动过程中始终平行,并且在电机的驱动下实现同步升降运动,因此与两根螺母杆联接的动平台可实现平面两维平动的运动。本发明结构简单、紧凑,具有占地空间小,动作灵活等优点。

一种万向主从摆动式齿轮传动机构及其同步摆动方法.pdf
本发明公开了一种万向主从摆动式齿轮传动机构及其同步摆动方法,包括箱体及对称装于箱体上的主、从动单元,主、从动单元包括摆杆、第一圆柱齿轮、第二圆柱齿轮、第一锥齿轮、第二锥齿轮、十字轴、双轴转接轴承、半空心短轴、箱体轴承、主轴、主轴轴承;摆杆与主轴连接,第一锥齿轮与主轴连接,主轴通过主轴轴承与十字轴形成转动副,十字轴通过箱体轴承与箱体形成转动副,第一圆柱齿轮与十字轴连接,十字轴通过双轴转接轴承与半空心短轴形成转动副,半空心短轴通过箱体轴承与箱体形成转动副,半空心短轴两端分别连接有第二锥齿轮和第二圆柱齿轮。本发