
基于光谱共焦及三角法原理的白光测头.pdf

是立****92


1/8
2/8

3/8

4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于光谱共焦及三角法原理的白光测头.pdf
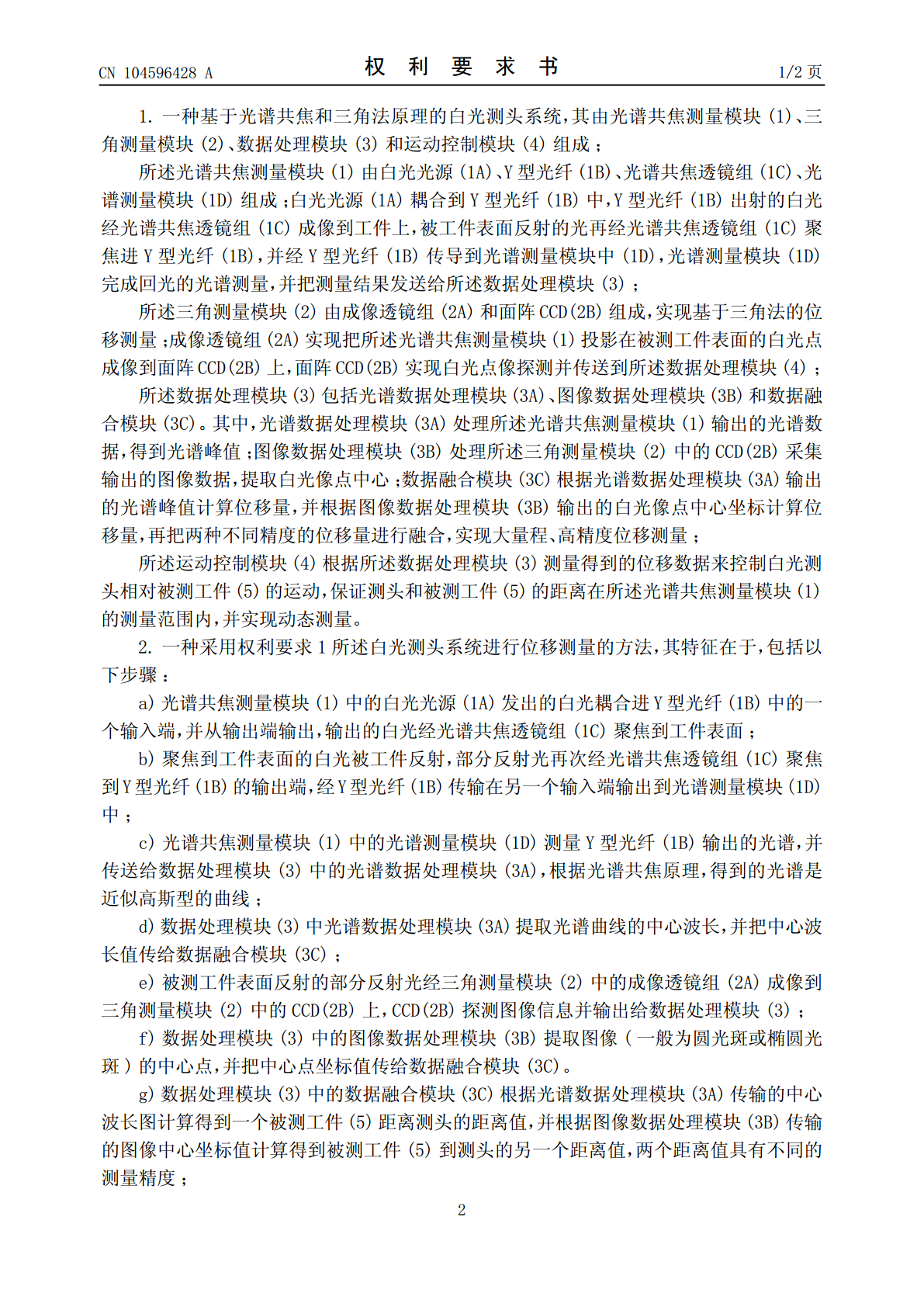
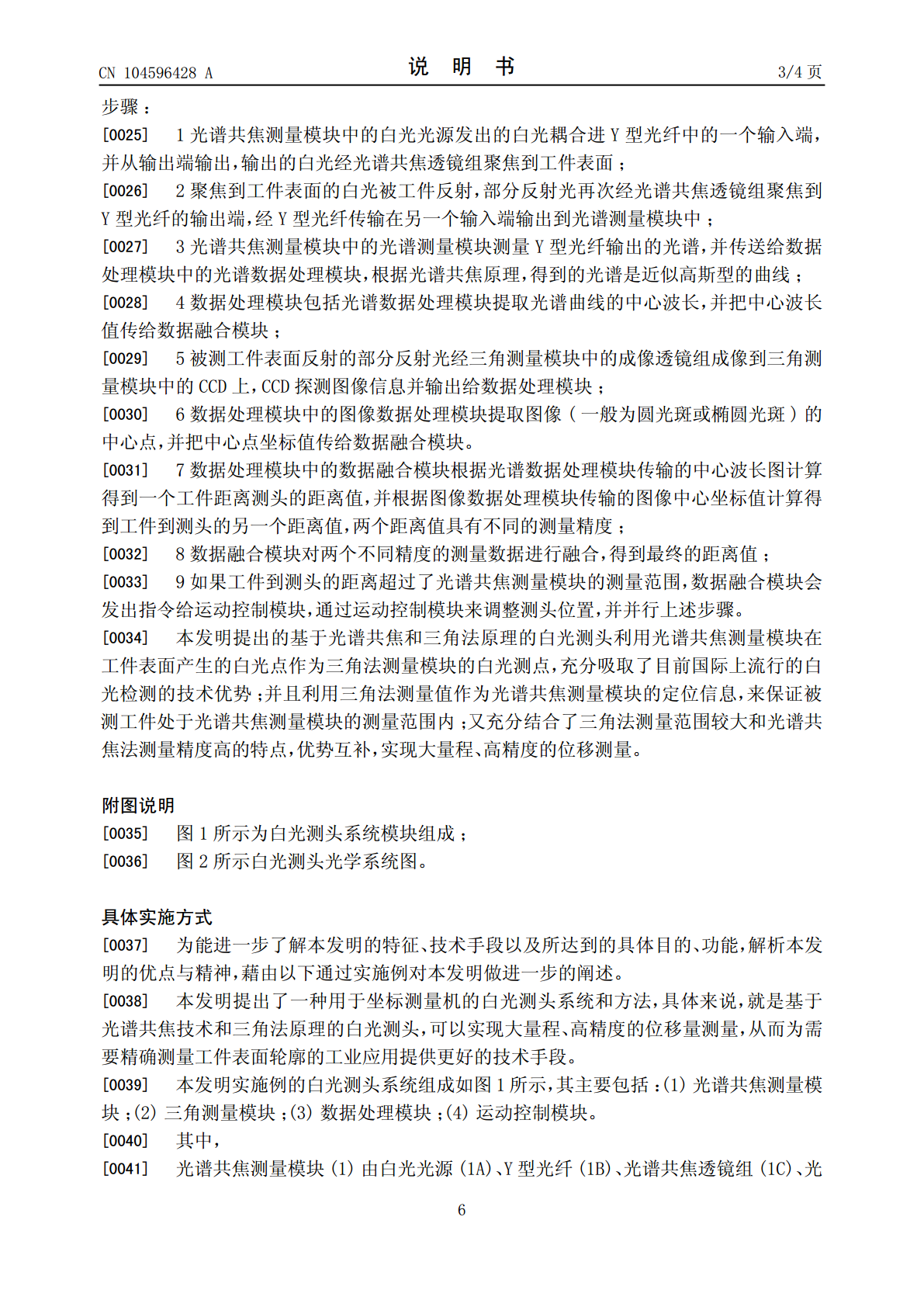
本发明公开了一种基于光谱共焦和三角法原理的白光测头系统和方法。本发明中的白光测头由光谱共焦测量模块、三角测量模块、数据处理模块和运动控制模块组成。光谱共焦测量模块完成基于光谱共焦原理的高精度位移测量,并为三角测量模块提供白光点光源;三角测量模块完成基于三角原理的位移测量,并为光谱共焦测量模块提供定位信息,保证被测工件与白光测头距离在光谱共焦测量模块的测量范围之内;数据处理模块完成对光谱共焦测量模块和三角测量模块输出数据的处理和融合,并把结果输出给运动控制模块;运动控制模块根据数据处理模块的计算结果调整白光
白光光谱共焦线扫描装置.pdf
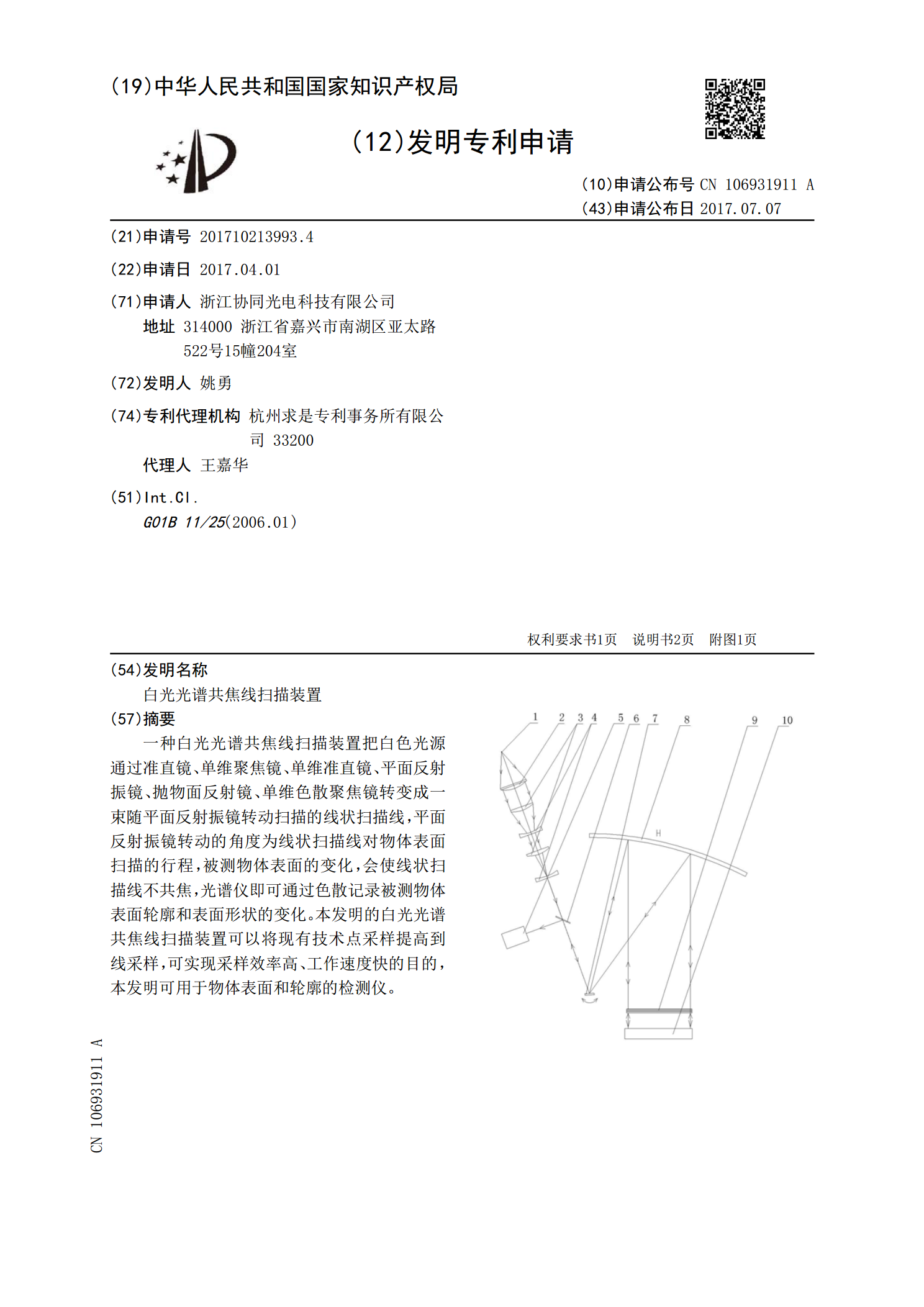
一种白光光谱共焦线扫描装置把白色光源通过准直镜、单维聚焦镜、单维准直镜、平面反射振镜、抛物面反射镜、单维色散聚焦镜转变成一束随平面反射振镜转动扫描的线状扫描线,平面反射振镜转动的角度为线状扫描线对物体表面扫描的行程,被测物体表面的变化,会使线状扫描线不共焦,光谱仪即可通过色散记录被测物体表面轮廓和表面形状的变化。本发明的白光光谱共焦线扫描装置可以将现有技术点采样提高到线采样,可实现采样效率高、工作速度快的目的,本发明可用于物体表面和轮廓的检测仪。
光谱共焦检测系统及方法.pdf
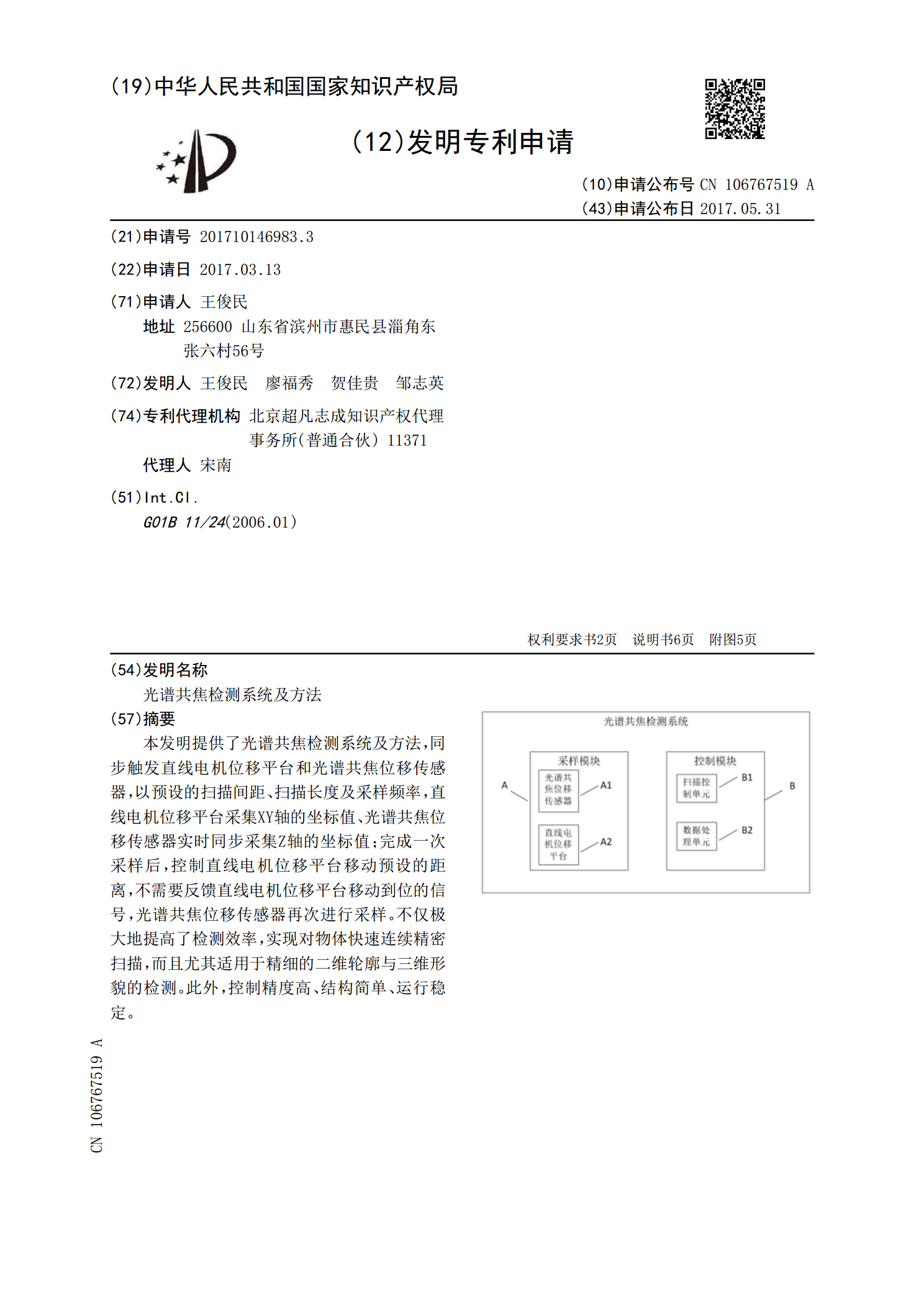
本发明提供了光谱共焦检测系统及方法,同步触发直线电机位移平台和光谱共焦位移传感器,以预设的扫描间距、扫描长度及采样频率,直线电机位移平台采集XY轴的坐标值、光谱共焦位移传感器实时同步采集Z轴的坐标值;完成一次采样后,控制直线电机位移平台移动预设的距离,不需要反馈直线电机位移平台移动到位的信号,光谱共焦位移传感器再次进行采样。不仅极大地提高了检测效率,实现对物体快速连续精密扫描,而且尤其适用于精细的二维轮廓与三维形貌的检测。此外,控制精度高、结构简单、运行稳定。

共焦拉曼光谱-郑晨.ppt
单个活态细胞的显微激光共焦拉曼光谱扫描技术应用研究目录1、关于单个活态细胞的激光共焦拉曼光谱扫描技术的简介Wood获得的随时间变化的红细胞拉曼图像和拉曼光谱。2、显微共焦拉曼散射扫描技术a图:分子光散射的几种成分:入射光(左下角)作用于分子产生了瑞利散射光(右上角)和拉曼散射光(右下角)b图:拉曼散射跃迁示意图2.2拉曼散射测量参数2.3拉曼散射的优缺点2.4、共焦技术的引入2.4.1共聚焦扫描显微镜的原理2.4.2二维扫描技术(拉曼成像)逐点扫描的二维拉曼光谱扫描技术3、显微激光共焦拉曼散射光谱仪扫描参

一种基于光谱共焦技术的叶尖间隙测量系统.pdf
本发明公开了一种基于光谱共焦技术的叶尖间隙测量系统,用于测量航空发动机或燃气涡轮机的转子,转子上设有叶片,叶尖间隙测量系统包括间隙传感器和控制器,间隙传感器和控制器依次设置于转子的一侧,间隙传感器由色散透镜和光纤传输线组成,光纤传输线由位于中心的主光纤和围绕在主光纤周围的辅助光纤组成,光纤传输线靠近色散透镜的一端为第一端口,另一端分为第二端口和第三端口,第一端口连接所述主光纤和辅助光纤,第二端口连接辅助光纤,第三端口连接主光纤;控制器包括光电转换模块、光纤耦合器、主控单元、光开关、N个光谱仪、宽带光源;该