
一种用于RCS测量的弧形导轨定位方法及系统.pdf

努力****元恺


1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于RCS测量的弧形导轨定位方法及系统.pdf
本发明提供一种用于RCS测量的弧形导轨定位方法及系统,有助于提高弧形导轨的定位精度。所述方法包括:获取北小车及南小车的测量码盘值,其中,用于测量码盘值的测量码盘分别与所述北小车及南小车的测量齿轮连接;根据获取的所述测量码盘值,确定所述北小车及南小车在所述弧形导轨上的角度位置。所述系统包括:获取单元,用于获取北小车及南小车的测量码盘值,其中,用于测量码盘值的测量码盘与所述北小车及南小车的测量齿轮连接;确定单元,用于根据获取的所述测量码盘值,确定所述北小车及南小车在所述弧形导轨上的角度位置。本发明适用于雷达信

一种用于螺旋导轨定位测量的工装结构.pdf
本发明涉及一种用于螺旋导轨定位测量的工装结构,包括量板,上导轨机构与下导轨机构分别安装在量板的两端,在上导轨机构和下导轨机构中分别安装用于与导轨摩擦运动的第一上卡轨轮,第二上卡轨轮,转向轮及下卡轨轮。本发明结构简单、使用方便,利用转向轮及各卡轨轮能实现与各段螺旋导轨的摩擦运动,从而快速找出螺旋导轨上的凸点,使座椅电梯能在螺旋导轨上平滑运作,保证了导轨拼焊时的平滑度。指针及尺条的布置便于操作人员直观的观察导轨间的间距,使其满足图纸要求。通过在量板上开有调节孔,实现了下导轨机构在量板上下位置的调节,从而能满足
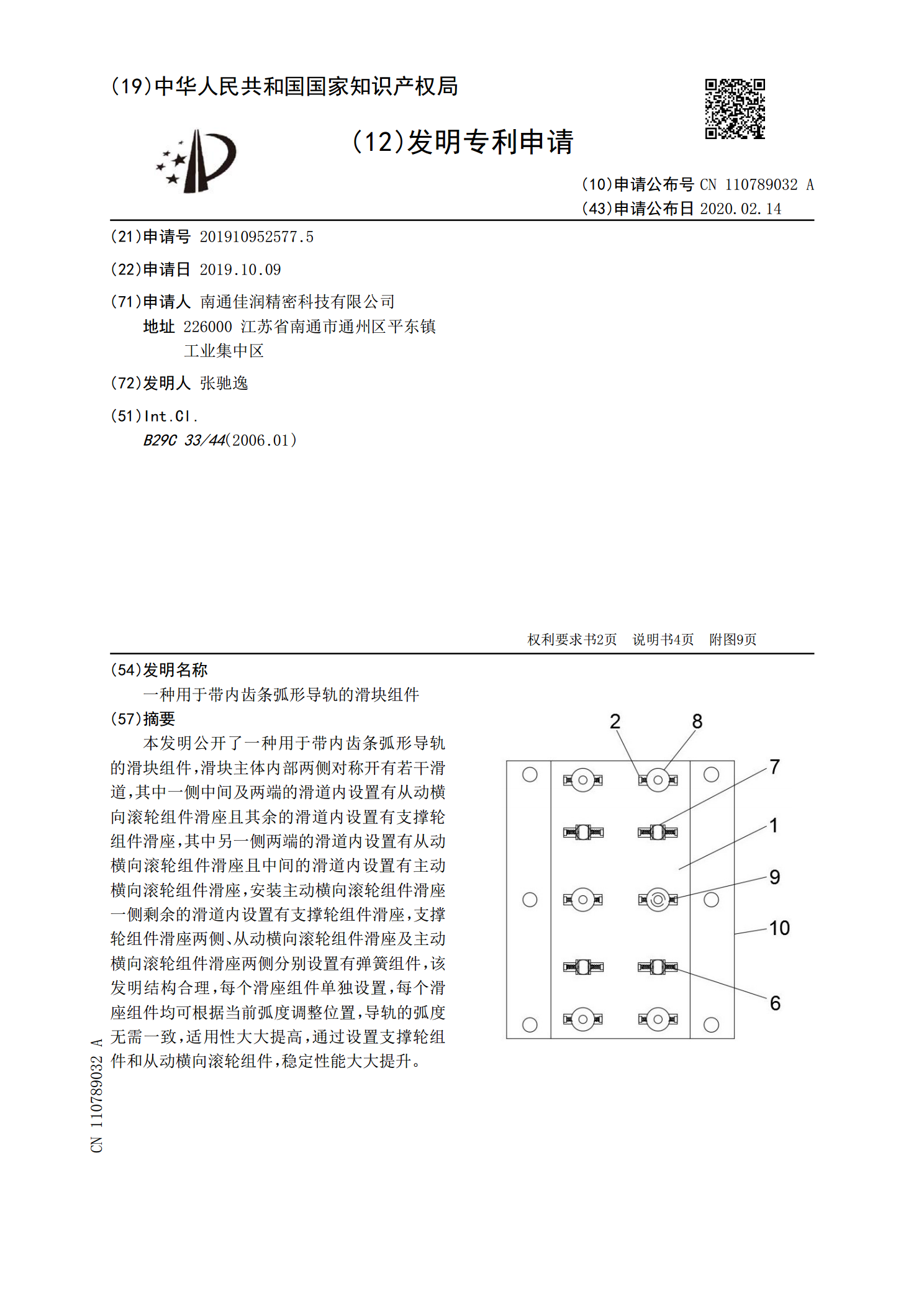
一种用于带内齿条弧形导轨的滑块组件.pdf
本发明公开了一种用于带内齿条弧形导轨的滑块组件,滑块主体内部两侧对称开有若干滑道,其中一侧中间及两端的滑道内设置有从动横向滚轮组件滑座且其余的滑道内设置有支撑轮组件滑座,其中另一侧两端的滑道内设置有从动横向滚轮组件滑座且中间的滑道内设置有主动横向滚轮组件滑座,安装主动横向滚轮组件滑座一侧剩余的滑道内设置有支撑轮组件滑座,支撑轮组件滑座两侧、从动横向滚轮组件滑座及主动横向滚轮组件滑座两侧分别设置有弹簧组件,该发明结构合理,每个滑座组件单独设置,每个滑座组件均可根据当前弧度调整位置,导轨的弧度无需一致,适用性

一种适用于关节驱动的弧形导轨机构.pdf
本发明涉及一种适用于关节驱动的弧形导轨机构,包括弧形导轨、轨道座和滑块,弧形导轨固定在轨道座上,滑块在弧形导轨上滑动,在轨道座两端安装有固定架,转轮两端连接有轴承,在固定架上还设有阶梯孔,阶梯孔中安装有线管,线管中安装有钢丝绳,通过固定架上的阶梯孔将钢丝绳从线管中分离出来,将钢丝绳在转轮上缠绕一圈后沿着弧形导轨侧面的凹槽布线最后将钢丝绳端头固定在滑块的一侧。本发明结构简洁、可靠,采用移动副来实现旋转副的功能,适用于外骨骼式机器人关节的设计,通过安装传感器可准确测量出关节摆动的角度,可广泛应用于机器人领域及

导轨弧形自动门系统.pdf
本发明公开了一种导轨弧形自动门系统,它包括基层支架(1)、导轨(2)、主滑轮组件、次滑轮组件、自动门(21),基层支架(1)、导轨(2)按同一弧形模数拉弯并焊接成整体;主滑轮组件固定在导轨(2)上,次滑轮组件可活动的安装在导轨(2)上,次滑轮组件包括次滑轮(9)、次滑轮固定件(10)、自动门固定件(8),自动门(21)通过自动门连接杆(12)与自动门固定件(8)连接固定;循环皮带(3)装配于主滑轮(7)上,循环皮带(3)能通过次滑轮(9)实现自动门固定件(8)移动。本发明可实现在弧形空间配置超大规格的大型