
基于行为识别和曲率约束的车辆轨迹预测方法研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于行为识别和曲率约束的车辆轨迹预测方法研究.docx
基于行为识别和曲率约束的车辆轨迹预测方法研究基于行为识别和曲率约束的车辆轨迹预测方法研究摘要:车辆轨迹预测在自动驾驶和交通系统优化中具有重要的应用价值。本文提出了一种基于行为识别和曲率约束的车辆轨迹预测方法,该方法综合考虑了车辆行为和路段特征,提高了预测准确性。首先,通过对车辆行为进行识别,根据行为类别将车辆划分为不同的群体。然后,利用曲率约束来规范车辆轨迹的生成过程。实验结果表明,所提出的方法在车辆轨迹预测中具有较高的准确性和可行性。1.引言随着自动驾驶技术的快速发展,车辆轨迹预测作为自动驾驶系统中的关
一种考虑曲率约束的自动驾驶车辆轨迹平滑优化方法.pdf
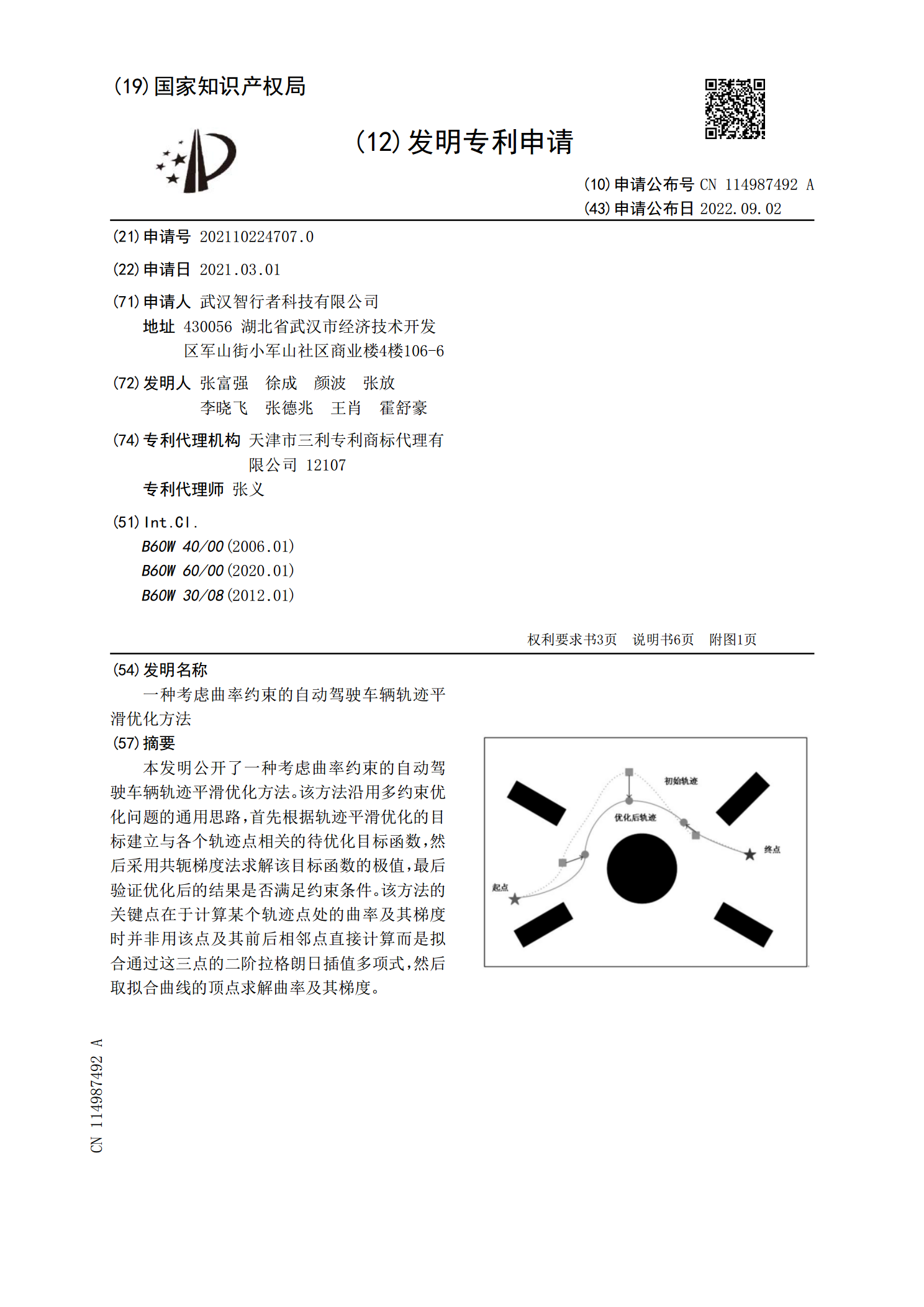
本发明公开了一种考虑曲率约束的自动驾驶车辆轨迹平滑优化方法。该方法沿用多约束优化问题的通用思路,首先根据轨迹平滑优化的目标建立与各个轨迹点相关的待优化目标函数,然后采用共轭梯度法求解该目标函数的极值,最后验证优化后的结果是否满足约束条件。该方法的关键点在于计算某个轨迹点处的曲率及其梯度时并非用该点及其前后相邻点直接计算而是拟合通过这三点的二阶拉格朗日插值多项式,然后取拟合曲线的顶点求解曲率及其梯度。

基于移动轨迹分析的大鼠行为识别研究.docx
基于移动轨迹分析的大鼠行为识别研究基于移动轨迹分析的大鼠行为识别研究摘要:大鼠行为识别在生物学、心理学和神经科学等领域具有重要的应用价值。本研究通过对大鼠行为的移动轨迹进行分析,提出了一种基于机器学习的大鼠行为识别方法。通过采集大鼠在实验环境中的运动轨迹数据,并综合考虑运动速度、运动方向和运动距离等特征,构建了一个行为识别模型。实验结果表明,该模型能够准确地对大鼠的不同行为进行识别,为研究大鼠行为提供了新的方法和手段。关键词:大鼠行为识别;移动轨迹分析;机器学习1.引言大鼠是一种常见的实验动物,在生物学、

基于车牌识别系统车辆轨迹的行为异常检测.docx
基于车牌识别系统车辆轨迹的行为异常检测摘要车牌识别系统是一种自动识别车牌号并记录在电脑数据中的技术,通过分析车牌号和车辆信息,可以对车辆的行为进行追踪和监测。本文主要讨论基于车牌识别系统车辆轨迹的行为异常检测方法,介绍了车辆轨迹的概念和基本特征,分析了车辆行为的规律和异常情况,并提出了基于特征分析和聚类算法的车辆行为异常检测方法。该方法具有检测准确性高、实时性强和操作简单等优点,可以为交通管理、安全监控和公共安全方面提供有效的技术支持。关键词:车牌识别系统;车辆轨迹;行为异常检测;特征分析;聚类算法引言随

一种基于CNN的车辆识别和轨迹追踪方法.pdf
本发明公开了一种基于CNN的车辆识别和轨迹追踪方法,首先是通过对视频帧进行轮廓识别,筛选出车辆候选目标区域,将这些候选区域输入到预先训练好的卷积神经网络中进行车辆和非车辆目标的分类识别,在获取车辆坐标后,绘制车辆的轨迹信息,并按车道提取车辆的轨迹信息。本发明克服了现有技术存在的缺陷,提高了车辆目标识别的准确性和实时性。