
基于阻抗控制的机器人旋拧阀门轴向位置自适应跟踪.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于阻抗控制的机器人旋拧阀门轴向位置自适应跟踪.docx
基于阻抗控制的机器人旋拧阀门轴向位置自适应跟踪基于阻抗控制的机器人旋拧阀门轴向位置自适应跟踪摘要随着自动化技术的发展,机器人在工业生产中的应用越来越广泛。其中,机器人在阀门旋拧任务中的应用,对于提高生产效率和减少人力成本具有重要意义。本文针对机器人在阀门旋拧任务中的轴向位置自适应跟踪问题展开研究,提出基于阻抗控制的解决方案。通过模型建立和控制策略设计,实现了机器人对阀门轴向位置的自适应跟踪。实验证明,所设计的控制系统能够有效地实现阀门旋拧任务中轴向位置的精确控制。1.引言阀门旋拧任务是工业生产中常见的一项
基于深度强化学习的机械臂旋拧阀门的自适应方法.pdf
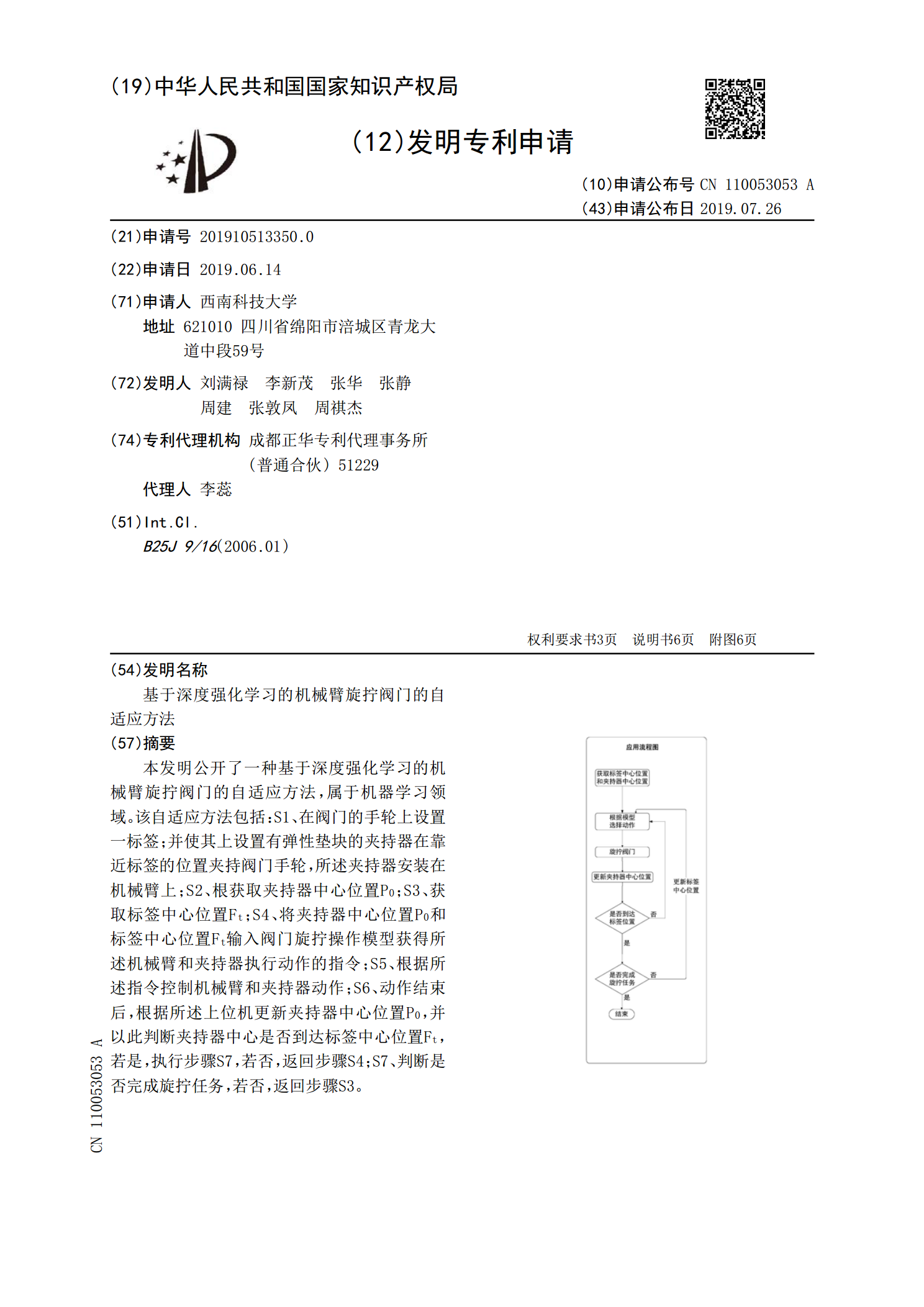
本发明公开了一种基于深度强化学习的机械臂旋拧阀门的自适应方法,属于机器学习领域。该自适应方法包括:S1、在阀门的手轮上设置一标签;并使其上设置有弹性垫块的夹持器在靠近标签的位置夹持阀门手轮,所述夹持器安装在机械臂上;S2、根获取夹持器中心位置P

一种柔顺自适应阀门旋拧机械手机构.pdf
一种柔顺自适应阀门旋拧机械手机构,它涉及一种阀门旋拧机械手机构。本发明为了解决现有的救灾机器人无法实现有容差与阀门手轮对接并实现旋拧阀门的末端执行器,导致救灾作业效率低、作业成本高的问题。本发明的伺服电机的输出端与心轴连接,心轴上设有虎克铰机构;工具接口件安装在三爪机械手上;三个小伞齿轮分别安装在机械手座中的中心爪座内,大伞齿轮安装在机械手座的中部上端,心轴插装在大伞齿轮上,每个爪座内设有一个丝杠座,每个丝杠的一端与丝杠座连接,每个丝杠的另一端与一个小伞齿轮连接,机械手指安装在一根丝杠上并与一个爪座可滑动
一种便于旋拧控制流水量的阀门.pdf
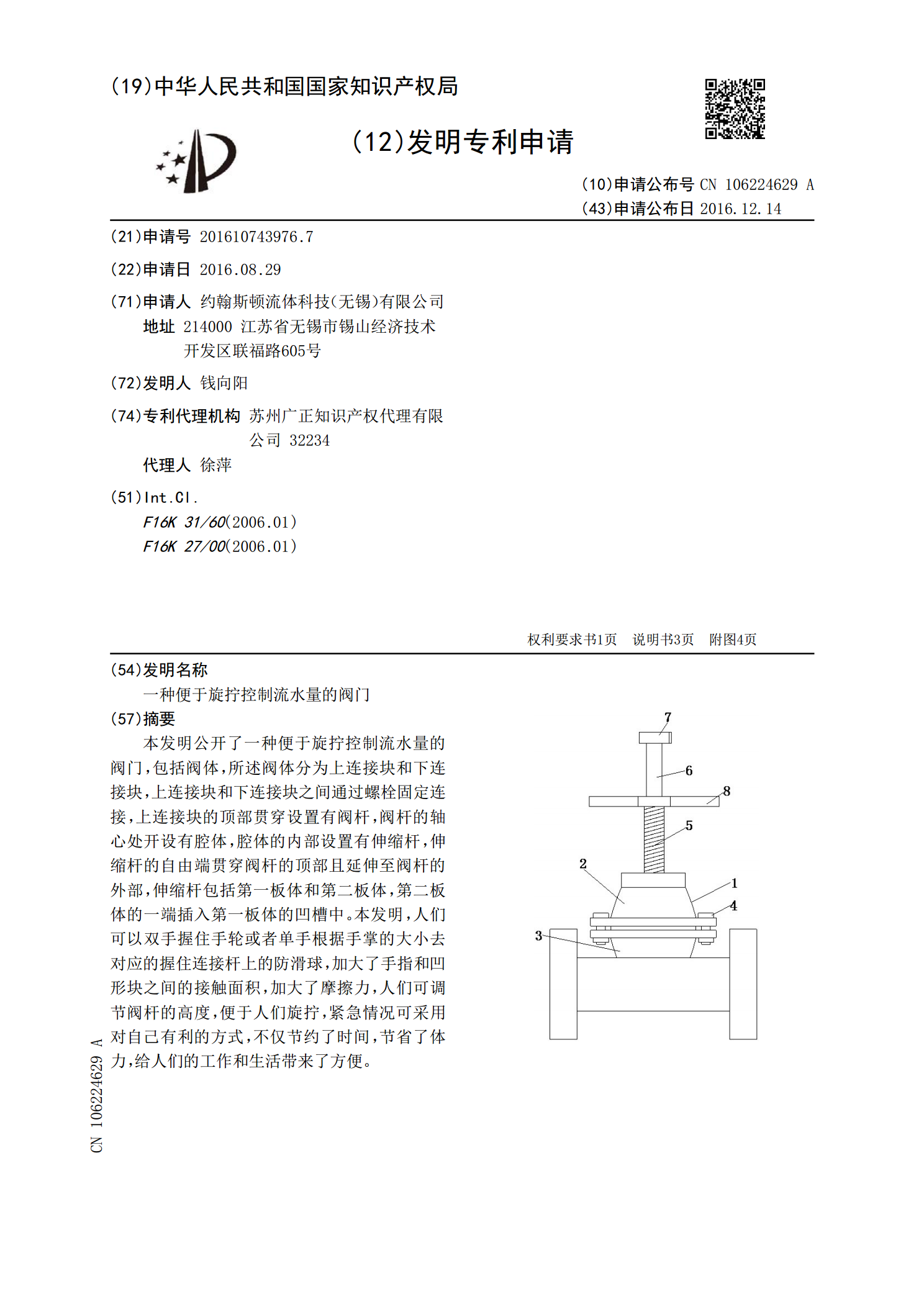
本发明公开了一种便于旋拧控制流水量的阀门,包括阀体,所述阀体分为上连接块和下连接块,上连接块和下连接块之间通过螺栓固定连接,上连接块的顶部贯穿设置有阀杆,阀杆的轴心处开设有腔体,腔体的内部设置有伸缩杆,伸缩杆的自由端贯穿阀杆的顶部且延伸至阀杆的外部,伸缩杆包括第一板体和第二板体,第二板体的一端插入第一板体的凹槽中。本发明,人们可以双手握住手轮或者单手根据手掌的大小去对应的握住连接杆上的防滑球,加大了手指和凹形块之间的接触面积,加大了摩擦力,人们可调节阀杆的高度,便于人们旋拧,紧急情况可采用对自己有利的方式

基于阻抗控制的步行康复训练机器人的轨迹自适应.docx
基于阻抗控制的步行康复训练机器人的轨迹自适应摘要:步行康复训练机器人是近年来发展迅速的医疗康复设备之一。本文提出了一种基于阻抗控制的步行康复训练机器人的轨迹自适应方法。该方法能够对患者的运动异常进行有效的控制,并能够在不同阶段提供不同的训练轨迹,以适应不同的康复需求。为了验证该方法的有效性,我们进行了一系列实验,并与传统的步行康复训练设备进行了比较。实验结果表明:该方法可以有效地提高患者的运动控制能力和康复效果,并能够与传统的步行康复训练设备相比具有更高的适应性和效率。关键词:步行康复训练机器人、阻抗控制