
基于频差和频差变化率的动目标定位反演解时差模糊算法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于频差和频差变化率的动目标定位反演解时差模糊算法.docx
基于频差和频差变化率的动目标定位反演解时差模糊算法基于频差和频差变化率的动目标定位反演解时差模糊算法摘要:动目标定位技术在无线通信系统、雷达系统和无人机等领域具有重要的应用价值。时差测量是常用的动目标定位方法之一,然而,目前的时差模糊算法在提高定位精度方面仍然存在一些问题。为了解决这些问题,本文提出了一种基于频差和频差变化率的动目标定位反演解时差模糊算法。该算法通过分析目标频差和频差变化率,提取目标的相关特征信息,并利用反演解算法进行时差模糊解。实验证明,该算法能够有效提高动目标定位的精度和鲁棒性。关键词

多站无源时差频差定位算法研究.docx
多站无源时差频差定位算法研究多站无源时差频差定位算法研究摘要:无线定位技术在室内和室外定位中起着重要的作用。无源定位系统,由于其低功耗、低成本和易于部署,越来越受到关注。无源时差频差定位算法是一种基于接收节点之间的时差和频差测量来实现定位的方法。本文对无源时差频差定位算法进行了研究,并分析了其优缺点。1.引言随着无线通信技术的发展,无线定位技术在许多领域得到了广泛应用,如室内导航、安防和智能农业等。传统的无线定位系统一般需要在目标对象上部署主动式标签或传感器,因此需要较高的能源消耗和复杂的安装。而无源定位

基于共轭模糊函数的时差-频差联合估计方法.docx
基于共轭模糊函数的时差-频差联合估计方法时差-频差联合估计在无线通信中是一个重要的问题,它可以用于同步信号的接收,相位和频率的校准,信号检测和解调等方面。为了解决这个问题,目前已经存在许多估计方法,本文将重点介绍一种基于共轭模糊函数的时差-频差联合估计方法。首先,我们需要了解一些关于共轭模糊函数的基础知识。在通信中,信号可以表示为一组基波的叠加。基波的周期被称为信号的周期,频率是周期的倒数。在实际应用中,接收到的信号往往会受到噪声和多径干扰等因素的影响,导致信号产生时差和频差。如果我们能够估计出这些时差和
一种基于混沌麻雀算法的时差/频差定位方法.pdf
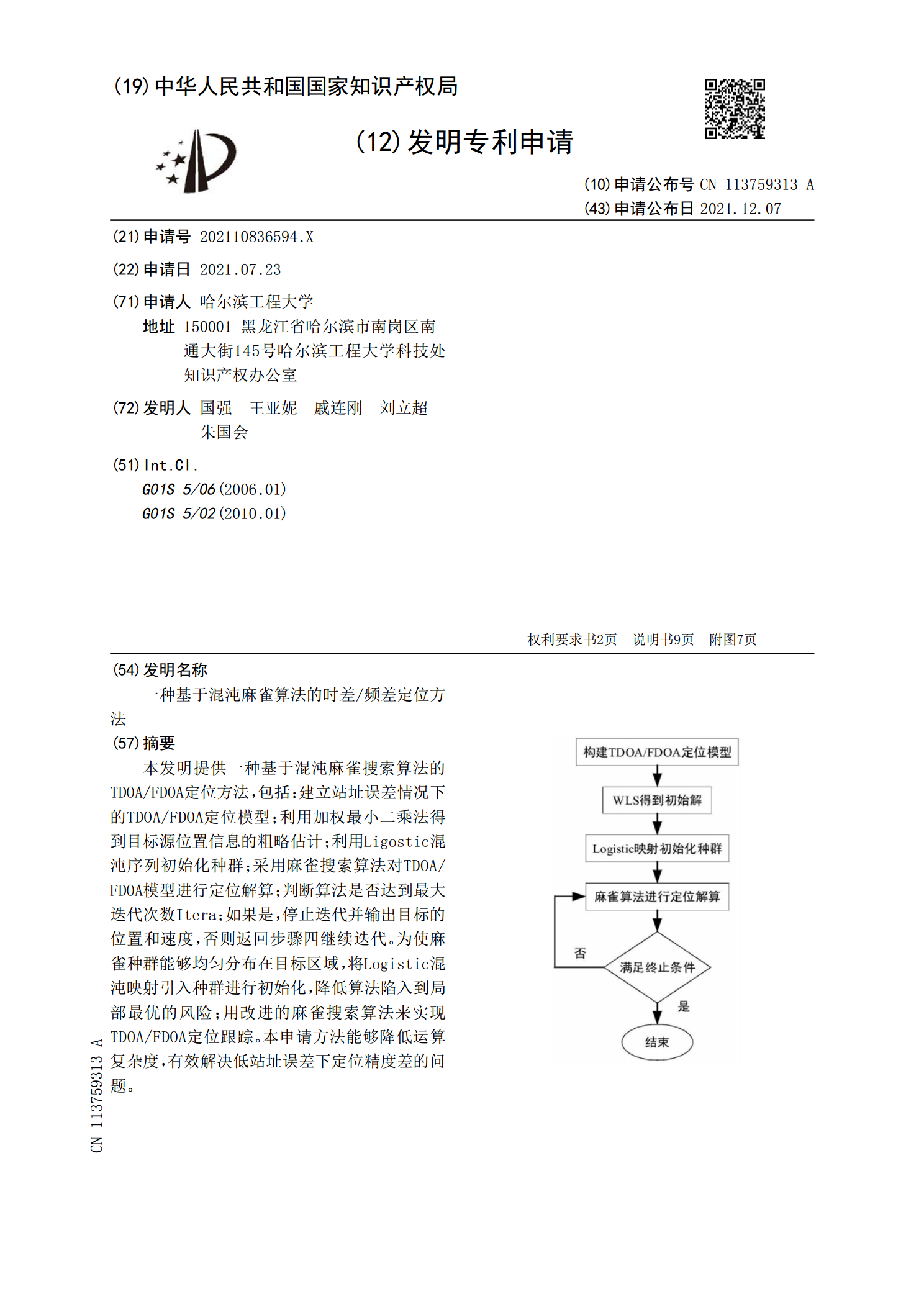
本发明提供一种基于混沌麻雀搜索算法的TDOA/FDOA定位方法,包括:建立站址误差情况下的TDOA/FDOA定位模型;利用加权最小二乘法得到目标源位置信息的粗略估计;利用Ligostic混沌序列初始化种群;采用麻雀搜索算法对TDOA/FDOA模型进行定位解算;判断算法是否达到最大迭代次数Itera;如果是,停止迭代并输出目标的位置和速度,否则返回步骤四继续迭代。为使麻雀种群能够均匀分布在目标区域,将Logistic混沌映射引入种群进行初始化,降低算法陷入到局部最优的风险;用改进的麻雀搜索算法来实现TDOA

迭代时差频差联合定位算法及其性能分析.docx
迭代时差频差联合定位算法及其性能分析一、引言在现代通信领域中,无线传输技术已经成为不可避免的选择。而在利用无线通信进行无线定位时,位置的准确性和精度往往是最重要的考虑因素。传统的无线定位技术经常会受到很多限制,常见的局限主要是基站实际数量的限制、信噪比的限制等。因此,为了解决这些局限问题,需要研究和开发新的无线定位技术。迭代时差频差联合定位技术是一种新兴的无线定位技术,它主要是基于无线通信原理和信号处理算法来实现的。该技术的主要优点是可以利用信号的时差和频差信息,提高定位精度,并且能够有效地克服已知信号的