
基于激光标靶和捷联惯导系统组合位姿测量方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于激光标靶和捷联惯导系统组合位姿测量方法.docx
基于激光标靶和捷联惯导系统组合位姿测量方法基于激光标靶和捷联惯导系统组合位姿测量方法摘要:激光标靶和捷联惯导是现代测量技术中常用的两种方法。然而,单独使用这两种方法存在一些局限性。本文提出了一种基于激光标靶和捷联惯导系统组合的位姿测量方法,以解决传统方法的局限性。该方法通过将激光标靶和捷联惯导系统结合使用,能够实现更加准确和稳定的位姿测量。引言:位姿测量是工程领域中一项重要的任务。在航空航天、机器人和自动化等领域,位姿测量需要具有高精度和高稳定性。传统的位姿测量方法包括使用激光标靶和使用捷联惯导系统。然而

基于捷联惯导系统的捷联罗经姿态测量方法.pdf
本发明提供一种基于捷联惯导系统的捷联罗经姿态测量方法。利用一套惯性测量组件信息,所述的惯性测量组件包括加速度计和陀螺,在导航计算机内运行捷联惯导系统、捷联罗经系统程序,分别建立捷联惯导系统、捷联罗经系统数学平台,利用捷联惯导系统输出速度和纬度补偿船舶速度、纬度和加速度对于捷联罗经系统的影响。本发明的方法不需引入外部速度参考设备,如电磁计程仪、多普勒计程仪,因此具有成本低、使用方便等优势。

激光陀螺捷联惯导系统保障模式浅析.docx
激光陀螺捷联惯导系统保障模式浅析激光陀螺捷联惯导系统是一种基于激光陀螺技术的惯导系统,具备较高的精度和稳定性,广泛应用于航空航天、船舶、导弹等领域。而保障模式是指在系统故障或异常情况下,能够自动切换或启用备份,确保系统的正常运行。本文将从功能、原理和应用三个方面对激光陀螺捷联惯导系统的保障模式进行深入分析和探讨,以期对该系统的研究和应用提供一定的参考和指导。激光陀螺捷联惯导系统保障模式的功能主要包括系统故障检测、故障隔离和备份启用。针对系统故障检测,激光陀螺捷联惯导系统通过实时监测系统状态和性能参数,识别

基于模型辅助捷联惯导组合导航仿真.docx
基于模型辅助捷联惯导组合导航仿真摘要:本文基于模型辅助捷联惯导组合导航的原理,进行了相关仿真研究。首先介绍了模型辅助捷联惯导组合导航的基本原理和流程,然后分析了各种误差对导航系统性能的影响,并借助Matlab进行了仿真实验。最后,分析了仿真实验结果,并对导航系统的改进提出了建议。关键词:模型辅助,捷联惯导,组合导航,Matlab,仿真实验。引言:模型辅助捷联惯导组合导航是一种复杂的导航系统,它结合多种导航技术,通过集成处理和互补学习,提高了导航系统的精度和可靠性。本文旨在通过仿真实验,验证模型辅助捷联惯导
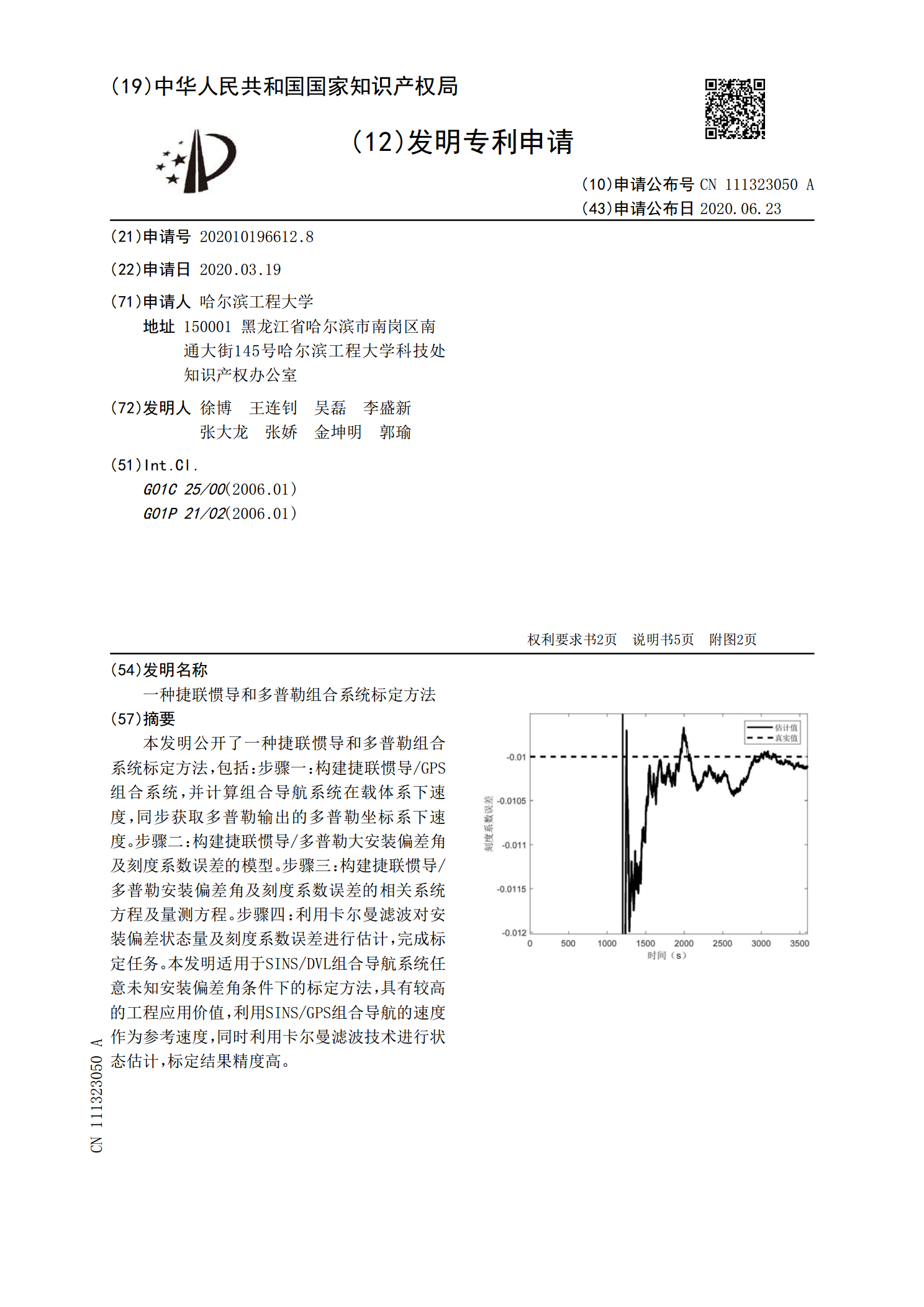
一种捷联惯导和多普勒组合系统标定方法.pdf
本发明公开了一种捷联惯导和多普勒组合系统标定方法,包括:步骤一:构建捷联惯导/GPS组合系统,并计算组合导航系统在载体系下速度,同步获取多普勒输出的多普勒坐标系下速度。步骤二:构建捷联惯导/多普勒大安装偏差角及刻度系数误差的模型。步骤三:构建捷联惯导/多普勒安装偏差角及刻度系数误差的相关系统方程及量测方程。步骤四:利用卡尔曼滤波对安装偏差状态量及刻度系数误差进行估计,完成标定任务。本发明适用于SINS/DVL组合导航系统任意未知安装偏差角条件下的标定方法,具有较高的工程应用价值,利用SINS/GPS组合导