
基于神经网络滑模的机械臂轨迹跟踪控制方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于神经网络滑模的机械臂轨迹跟踪控制方法.pptx
汇报人:/目录0102神经网络滑模控制原理神经网络滑模控制的优势神经网络滑模控制的应用场景03机械臂轨迹跟踪控制的意义机械臂轨迹跟踪控制的实现方式机械臂轨迹跟踪控制的挑战与问题04控制方法的设计思路控制方法的实现过程控制方法的实验验证与结果分析05控制方法的优势分析控制方法的局限性分析控制方法的改进方向与未来发展06实际应用案例介绍未来发展前景展望对相关领域的影响与贡献汇报人:

基于神经网络滑模的机械臂轨迹跟踪控制方法.docx
基于神经网络滑模的机械臂轨迹跟踪控制方法摘要机械臂轨迹跟踪控制是现代工业生产中非常重要的一环。本文提出一种基于神经网络滑模的机械臂轨迹跟踪控制方法,通过神经网络技术对目标轨迹进行建模,实现对机械臂运动的有效控制。实验结果显示,该方法具有较高的跟踪精度和鲁棒性,能够满足机械臂在复杂环境中的轨迹跟踪要求。关键词:机械臂;轨迹跟踪;神经网络滑模控制;建模1.引言机械臂作为现代工业自动化生产中的重要组成部分,实现了高效、高精度的物料搬运和加工。在实际应用中,机械臂的运动轨迹需要被精确控制,以保证工作完成的质量和效
一种基于滑模神经网络的智能车轨迹跟踪控制方法.pdf
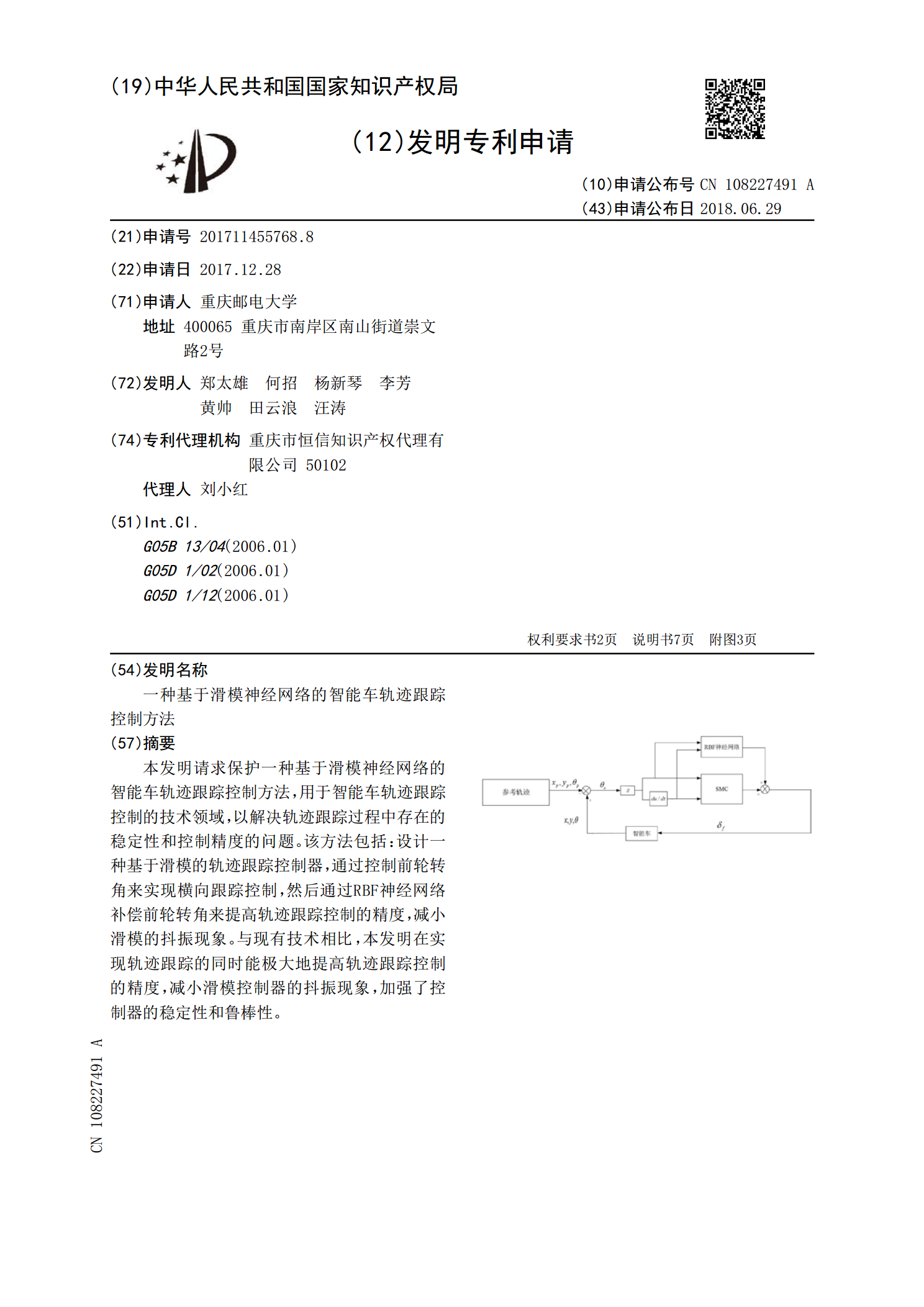
本发明请求保护一种基于滑模神经网络的智能车轨迹跟踪控制方法,用于智能车轨迹跟踪控制的技术领域,以解决轨迹跟踪过程中存在的稳定性和控制精度的问题。该方法包括:设计一种基于滑模的轨迹跟踪控制器,通过控制前轮转角来实现横向跟踪控制,然后通过RBF神经网络补偿前轮转角来提高轨迹跟踪控制的精度,减小滑模的抖振现象。与现有技术相比,本发明在实现轨迹跟踪的同时能极大地提高轨迹跟踪控制的精度,减小滑模控制器的抖振现象,加强了控制器的稳定性和鲁棒性。

基于鲁棒控制的机械臂轨迹跟踪控制方法研究.docx
基于鲁棒控制的机械臂轨迹跟踪控制方法研究基于鲁棒控制的机械臂轨迹跟踪控制方法研究摘要:机械臂的轨迹跟踪控制是机器人研究领域的重要问题之一。传统的控制方法存在着对不确定因素和外部干扰的鲁棒性较差的问题,为了提高机械臂的轨迹跟踪性能,本文提出了一种基于鲁棒控制的机械臂轨迹跟踪控制方法。该方法通过引入鲁棒控制器,能够有效地处理系统模型误差和未知外部干扰,保证了机械臂的轨迹跟踪性能。关键词:机械臂;轨迹跟踪;鲁棒控制1.引言机械臂是一种重要的工业自动化装置,广泛应用于生产线上的物料搬运、精密装配等工业领域。机械臂

基于神经网络柔性关节机械臂反演滑模控制.docx
基于神经网络柔性关节机械臂反演滑模控制摘要:机械臂的控制一直是机器人领域的研究热点之一。传统的机械臂控制方法往往依赖于精确的模型和准确的参数,但很难满足复杂任务的要求。随着神经网络的快速发展,越来越多的研究者开始将其应用于机械臂的控制中。本文提出了基于神经网络的柔性关节机械臂反演滑模控制方法,该方法可以有效地解决传统控制方法存在的问题。一、引言机械臂是一种具有多关节结构的机器人,可以在空间中完成复杂的任务。传统的机械臂控制方法主要依赖于精确的数学模型和准确的参数,但由于传感器误差和模型不确定性等原因,很难