
基于改进Faster RCNN的毫米波图像实时目标检测.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于改进Faster RCNN的毫米波图像实时目标检测.docx
基于改进FasterRCNN的毫米波图像实时目标检测摘要:在自动驾驶和智能交通系统中,毫米波雷达图像广泛应用于目标检测任务。然而,由于毫米波图像的低分辨率和噪声干扰,实时目标检测仍然面临着巨大的挑战。本文提出了一种基于改进FasterRCNN的毫米波图像实时目标检测方法。首先,我们引入了一种新的数据增强技术,通过修改毫米波图像的亮度、对比度和噪声模式来增加数据的多样性。然后,我们在毫米波图像上应用了一种改进的候选框生成算法,使用深度卷积神经网络来提取候选框的特征。最后,我们采用多层感知机(MLP)作为分类

基于改进Faster RCNN与Grabcut的商品图像检测.docx
基于改进FasterRCNN与Grabcut的商品图像检测商品图像检测一直是计算机视觉领域的研究热点之一。在基于深度学习的方法中,FasterRCNN是一种非常经典和有效的目标检测算法,而Grabcut则是一种常用的图像分割算法。本文将基于改进的FasterRCNN和Grabcut算法提出一种商品图像检测方法,以提高商品检测的准确性和效率。首先,我们简要介绍一下FasterRCNN算法的基本原理。FasterRCNN是一种两阶段目标检测算法,它由两个主要组件组成:RegionProposalNetwork

基于改进Faster RCNN的目标检测算法.pptx
汇报人:CONTENTS添加章节标题FasterRCNN算法概述FasterRCNN算法的原理和流程优势:a.速度快:FasterRCNN算法采用了RPN网络,可以快速生成候选框,提高了检测速度。b.准确率高:FasterRCNN算法采用了卷积神经网络,可以提取出更准确的特征,提高了检测准确率。c.适应性强:FasterRCNN算法可以应用于各种目标检测任务,具有较强的适应性。a.速度快:FasterRCNN算法采用了RPN网络,可以快速生成候选框,提高了检测速度。b.准确率高:FasterRCNN算法采
一种基于改进Faster RCNN的目标检测方法.pdf
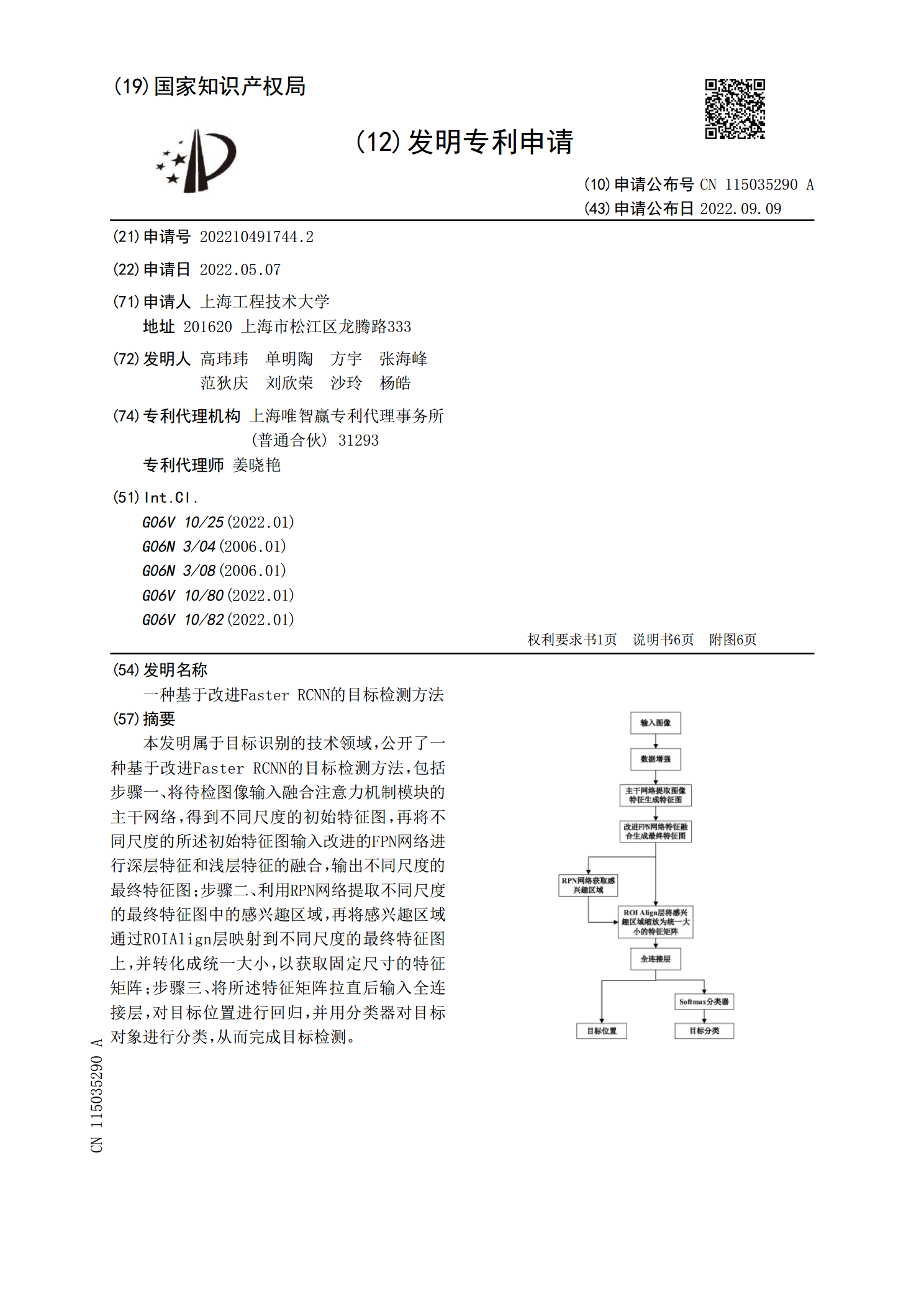
本发明属于目标识别的技术领域,公开了一种基于改进FasterRCNN的目标检测方法,包括步骤一、将待检图像输入融合注意力机制模块的主干网络,得到不同尺度的初始特征图,再将不同尺度的所述初始特征图输入改进的FPN网络进行深层特征和浅层特征的融合,输出不同尺度的最终特征图;步骤二、利用RPN网络提取不同尺度的最终特征图中的感兴趣区域,再将感兴趣区域通过ROIAlign层映射到不同尺度的最终特征图上,并转化成统一大小,以获取固定尺寸的特征矩阵;步骤三、将所述特征矩阵拉直后输入全连接层,对目标位置进行回归,并用
基于改进的Faster RCNN的行人检测方法.pdf
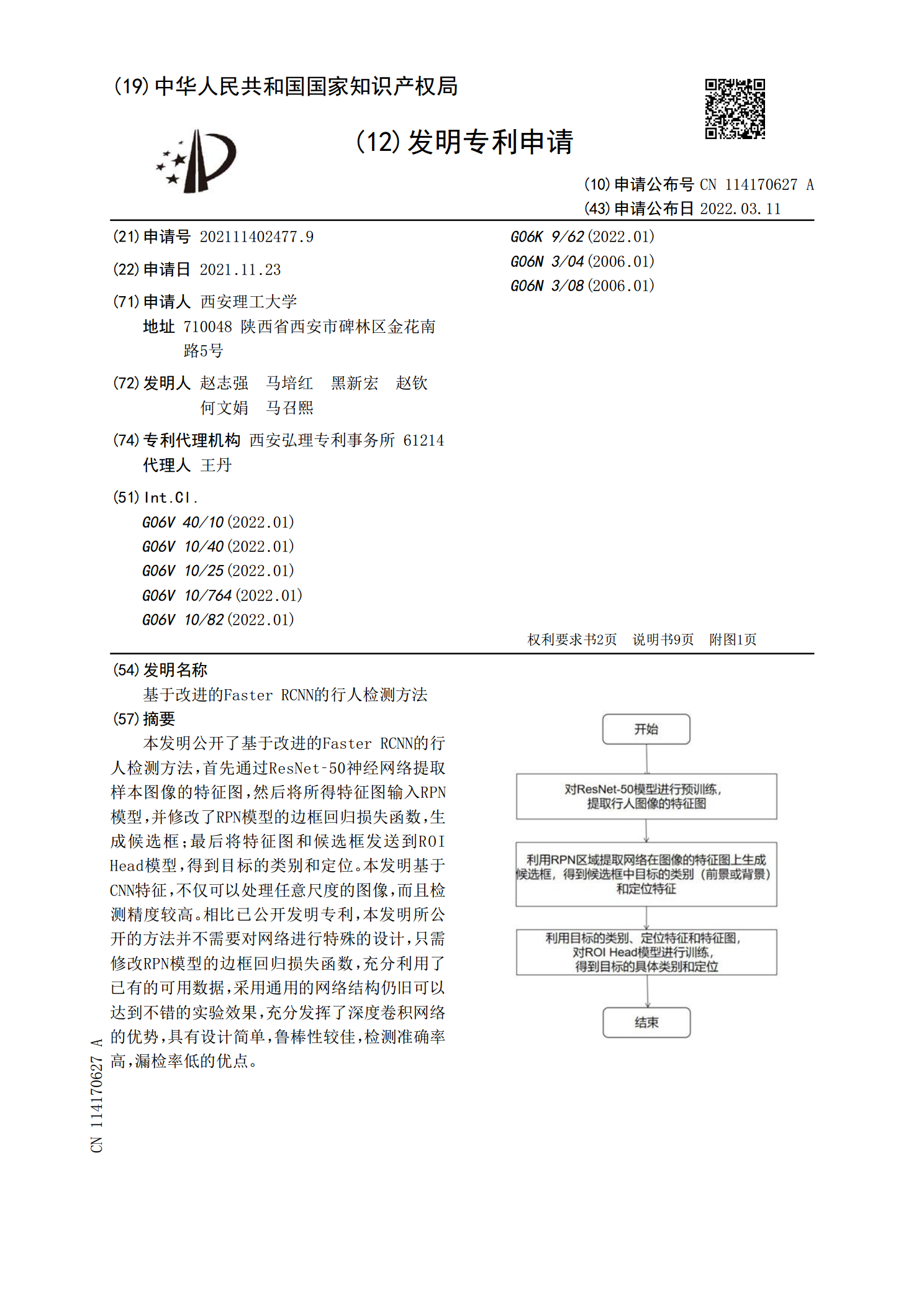
本发明公开了基于改进的FasterRCNN的行人检测方法,首先通过ResNet‑50神经网络提取样本图像的特征图,然后将所得特征图输入RPN模型,并修改了RPN模型的边框回归损失函数,生成候选框;最后将特征图和候选框发送到ROIHead模型,得到目标的类别和定位。本发明基于CNN特征,不仅可以处理任意尺度的图像,而且检测精度较高。相比已公开发明专利,本发明所公开的方法并不需要对网络进行特殊的设计,只需修改RPN模型的边框回归损失函数,充分利用了已有的可用数据,采用通用的网络结构仍旧可以达到不错的实验效