
基于多传感器测量的航天器舱段自动对接位姿调整方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多传感器测量的航天器舱段自动对接位姿调整方法.docx
基于多传感器测量的航天器舱段自动对接位姿调整方法标题:基于多传感器测量的航天器舱段自动对接位姿调整方法摘要:航天器自动对接是一项关键技术,在航天工程中起到至关重要的作用。本文提出了一种基于多传感器测量的航天器舱段自动对接位姿调整方法,通过多传感器测量舱段相对位姿信息,实现对舱段位姿的自动调整。首先,介绍了航天器自动对接的研究背景和意义。然后,详细描述了基于多传感器测量的航天器舱段自动对接位姿调整方法的原理和步骤。最后,通过实验验证了该方法的有效性和可行性。关键词:航天器自动对接、位姿调整、多传感器测量一、

舱段自动装配位姿求解方法研究.docx
舱段自动装配位姿求解方法研究摘要:在工业自动化生产领域中,舱段自动装配是一项关键技术,它可以实现高效率、高精度、高质量地完成舱段的组装任务,具有重要的应用价值。本文对舱段自动装配位姿求解的方法进行了研究,探讨了主要的的求解方法及其优缺点,重点分析了基于蒙特卡罗采样的位姿求解方法。本文也对该方法进行了实验验证,结果表明,该方法可以有效地解决舱段自动装配的位姿求解问题。关键词:舱段自动装配,位姿求解,蒙特卡罗采样引言:随着航空航天工业的发展,大型飞机和空间站的组装工作变得越来越复杂和困难。为了提高生产效率和经
一种用于圆柱形舱段对接的位姿在线测量系统及方法.pdf
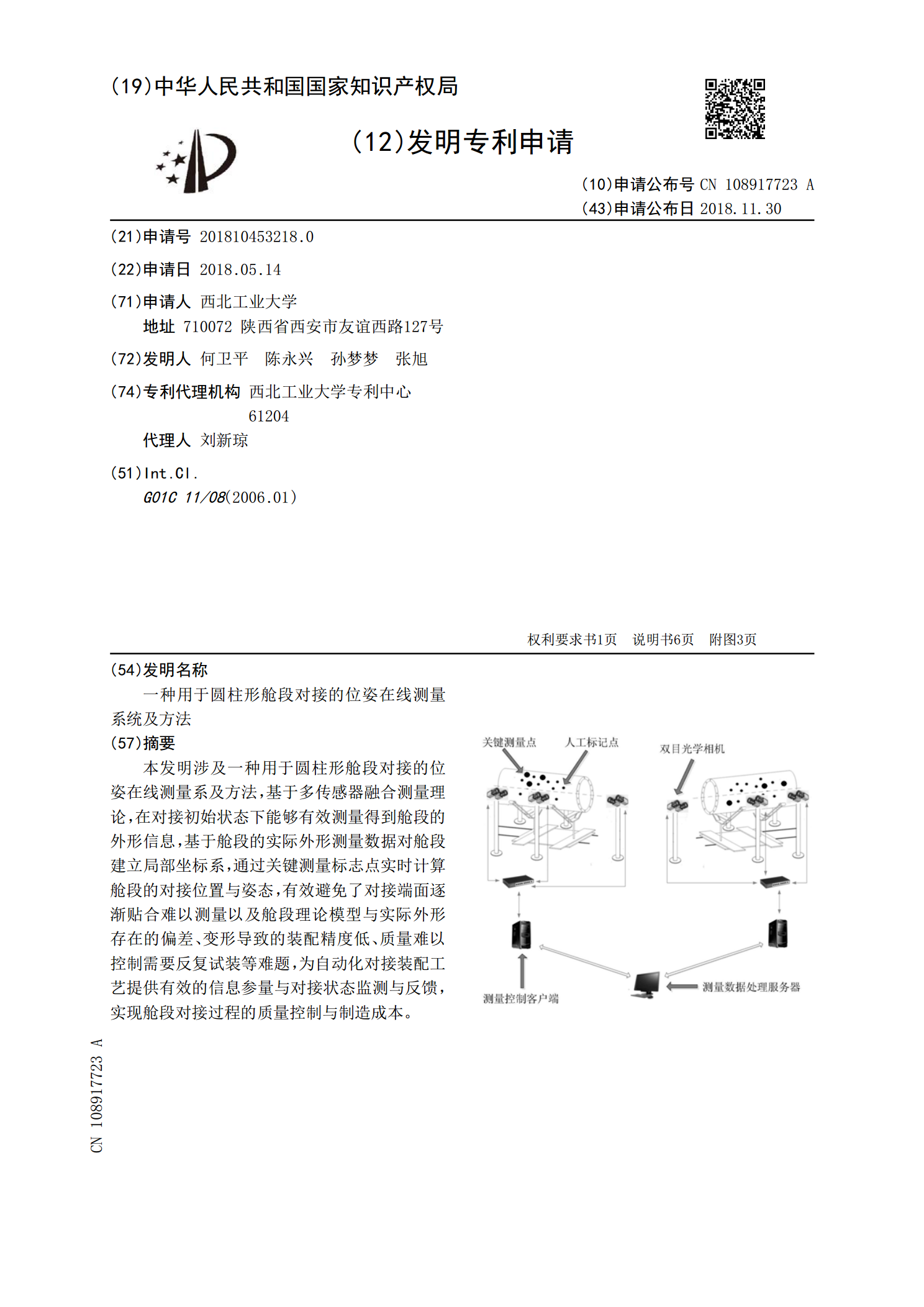
本发明涉及一种用于圆柱形舱段对接的位姿在线测量系及方法,基于多传感器融合测量理论,在对接初始状态下能够有效测量得到舱段的外形信息,基于舱段的实际外形测量数据对舱段建立局部坐标系,通过关键测量标志点实时计算舱段的对接位置与姿态,有效避免了对接端面逐渐贴合难以测量以及舱段理论模型与实际外形存在的偏差、变形导致的装配精度低、质量难以控制需要反复试装等难题,为自动化对接装配工艺提供有效的信息参量与对接状态监测与反馈,实现舱段对接过程的质量控制与制造成本。

基于三目视觉的航天器交会对接位姿测量方法研究.docx
基于三目视觉的航天器交会对接位姿测量方法研究摘要本文提出了一种基于三目视觉的航天器交会对接位姿测量方法。该方法利用三个摄像机对目标航天器进行观测,并通过计算机视觉算法得出目标航天器与本地航天器之间的相对位姿。根据实验结果,本文提出的方法能够有效地测量航天器的位姿,并能够在实际应用中得到很好的效果。关键词:三目视觉,航天器,交会对接,位姿测量AbstractThispaperproposesamethodformeasuringtheposeofspacecraftrendezvousanddockingb
基于目标物对接环的对接设备位姿调整方法、系统.pdf
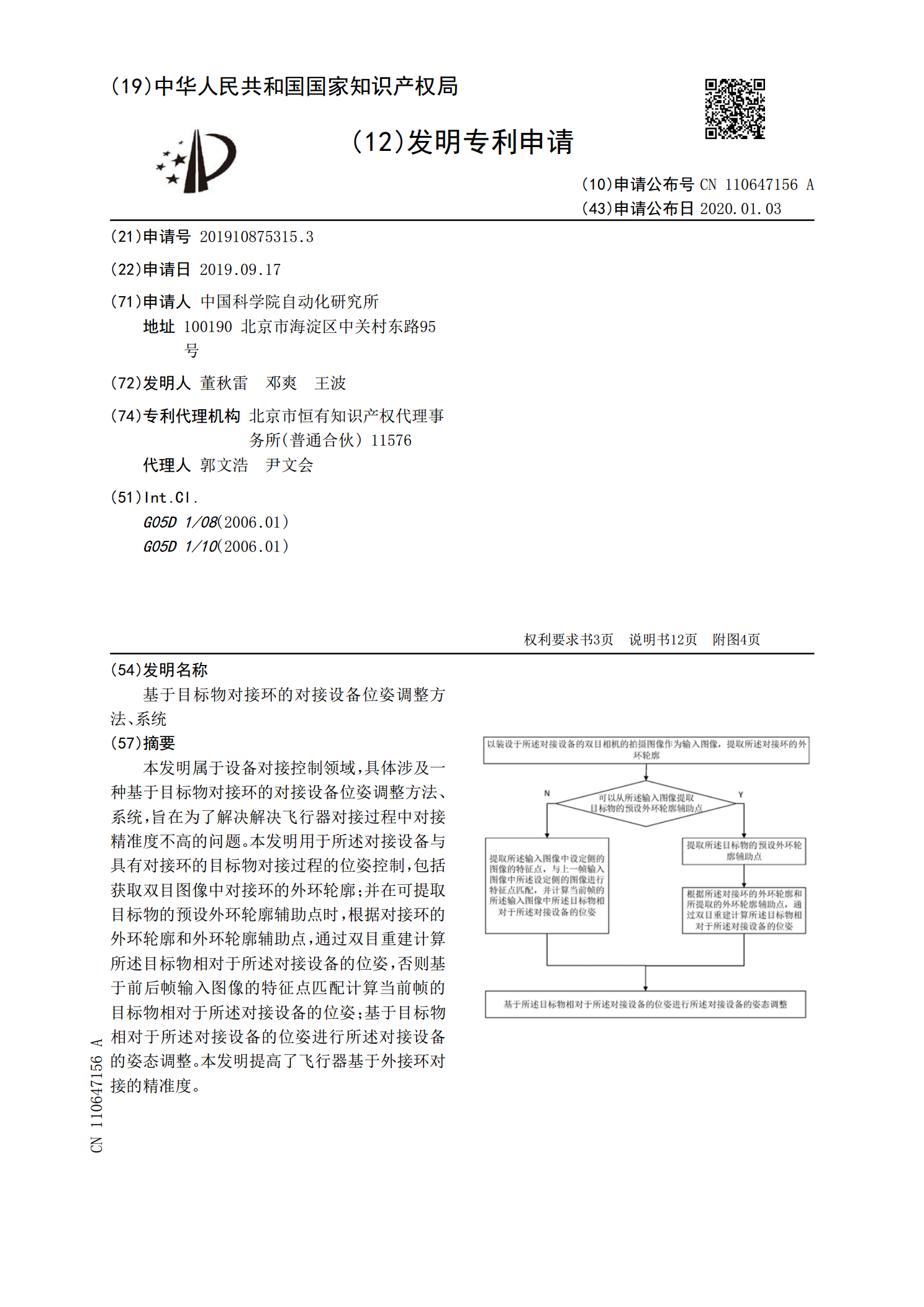
本发明属于设备对接控制领域,具体涉及一种基于目标物对接环的对接设备位姿调整方法、系统,旨在为了解决解决飞行器对接过程中对接精准度不高的问题。本发明用于所述对接设备与具有对接环的目标物对接过程的位姿控制,包括获取双目图像中对接环的外环轮廓;并在可提取目标物的预设外环轮廓辅助点时,根据对接环的外环轮廓和外环轮廓辅助点,通过双目重建计算所述目标物相对于所述对接设备的位姿,否则基于前后帧输入图像的特征点匹配计算当前帧的目标物相对于所述对接设备的位姿;基于目标物相对于所述对接设备的位姿进行所述对接设备的姿态调整。本