
基于多尺度特征融合的Faster-RCNN道路目标检测.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多尺度特征融合的Faster-RCNN道路目标检测.docx
基于多尺度特征融合的Faster-RCNN道路目标检测基于多尺度特征融合的Faster-RCNN道路目标检测摘要:道路目标检测在自动驾驶和智能交通系统中具有重要意义。本文提出了一种基于多尺度特征融合的Faster-RCNN(Region-basedConvolutionalNeuralNetworks)道路目标检测方法。该方法通过融合多尺度特征,在不同尺度下检测道路目标,提高了检测的准确性和鲁棒性。实验结果表明,该方法在道路目标检测方面取得了明显的改进。1.引言道路目标检测是自动驾驶和智能交通系统中关键的

基于多尺度分支结构特征融合的目标检测研究.docx
基于多尺度分支结构特征融合的目标检测研究基于多尺度分支结构特征融合的目标检测研究摘要:随着计算机视觉的快速发展,目标检测技术在各个领域中得到了广泛应用。然而,由于目标的尺寸、形状和背景的多样性,实现高效准确的目标检测仍然是一个具有挑战性的问题。为了解决这个问题,本文提出了一种基于多尺度分支结构特征融合的目标检测方法。该方法通过多尺度分支结构提取目标的特征,然后通过特征融合的方式进行目标检测,实现了更准确和鲁棒的目标检测结果。1.引言目标检测是计算机视觉中的一个重要任务,其广泛应用于智能监控、自动驾驶、机器

基于多尺度特征融合的无人车目标检测算法.pptx
基于多尺度特征融合的无人车目标检测算法01添加章节标题算法概述算法定义算法应用场景算法优势多尺度特征融合技术特征融合基本原理多尺度特征提取方法特征融合策略实验验证与结果分析无人车目标检测算法流程数据预处理特征提取目标检测与识别目标跟踪与轨迹预测算法性能评估准确度评估实时性评估鲁棒性评估实验结果对比分析算法优化与改进方向算法优化策略改进方向与预期效果未来发展前景与挑战感谢观看
一种基于目标检测的多尺度特征融合方法.pdf
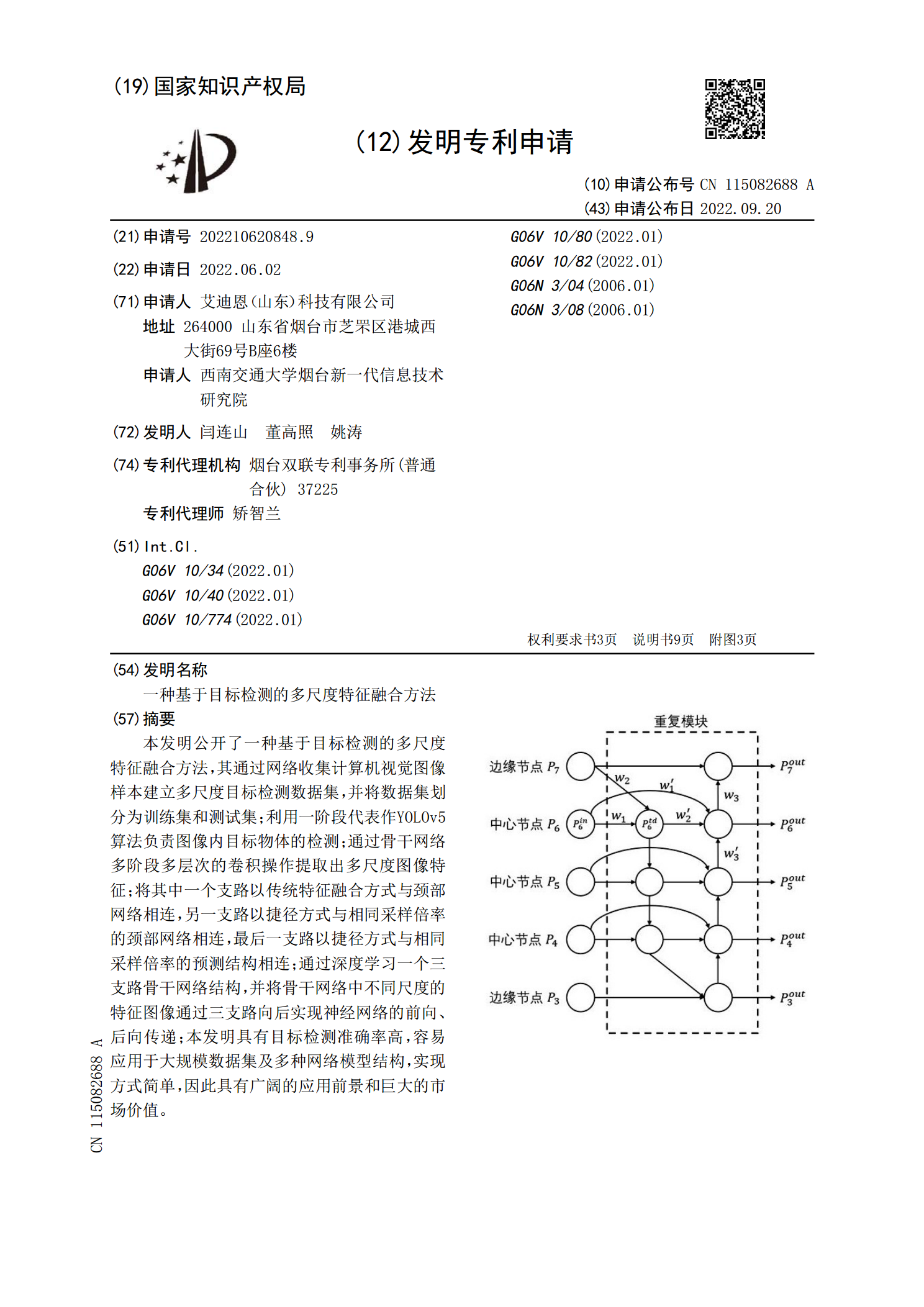
本发明公开了一种基于目标检测的多尺度特征融合方法,其通过网络收集计算机视觉图像样本建立多尺度目标检测数据集,并将数据集划分为训练集和测试集;利用一阶段代表作YOLOv5算法负责图像内目标物体的检测;通过骨干网络多阶段多层次的卷积操作提取出多尺度图像特征;将其中一个支路以传统特征融合方式与颈部网络相连,另一支路以捷径方式与相同采样倍率的颈部网络相连,最后一支路以捷径方式与相同采样倍率的预测结构相连;通过深度学习一个三支路骨干网络结构,并将骨干网络中不同尺度的特征图像通过三支路向后实现神经网络的前向、后向传递

基于SSD目标检测算法的多尺度特征融合技术.docx
基于SSD目标检测算法的多尺度特征融合技术基于SSD目标检测算法的多尺度特征融合技术摘要:目标检测是计算机视觉领域的一个重要任务,其在图像处理、智能监控和自动驾驶等领域具有广泛的应用。本论文基于SSD目标检测算法,研究了多尺度特征融合技术对目标检测性能的影响。通过在SSD算法的基础上引入多尺度特征融合模块,实现了对不同尺度的特征信息的融合,从而提高目标检测的准确率和效果。实验结果表明,多尺度特征融合技术对于改善SSD目标检测算法的性能具有明显的效果。关键词:目标检测;SSD算法;多尺度特征融合技术1.引言