
基于多尺度支撑域描述子的多光谱图像匹配算法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多尺度支撑域描述子的多光谱图像匹配算法.docx
基于多尺度支撑域描述子的多光谱图像匹配算法摘要本文基于多尺度支撑域描述子,提出了一种多光谱图像匹配算法。该算法将多光谱图像的匹配过程视作特征点互相寻找相应特征点的过程,通过在不同尺度下计算支撑域描述子,得到特征点的不同特征向量。进一步结合RANSAC算法,可以有效筛选非匹配点,并得到更准确的匹配结果。实验结果表明,该算法在不受噪声和光照变化的情况下,能够取得较好的匹配效果。关键词:多光谱图像,多尺度支撑域描述子,RANSAC算法,特征点匹配1.引言多光谱遥感图像广泛应用于地理信息系统、环境监测、农业资源调

基于特征点的多尺度图像匹配算法研究及其应用.docx
基于特征点的多尺度图像匹配算法研究及其应用基于特征点的多尺度图像匹配算法研究及其应用摘要:图像匹配是计算机视觉中的一个重要研究方向,广泛应用于图像识别、目标跟踪等领域。本文以特征点为基础,结合多尺度算法,对图像匹配进行研究。首先介绍了图像特征点的基本概念和常用的特征点检测算法,然后介绍了多尺度算法的原理及其在图像匹配中的应用。接着,提出了一种基于特征点的多尺度图像匹配算法,并对其进行了实证实验。实验结果表明,该算法在不同尺度下均能有效匹配图像,并且具有较好的鲁棒性和准确性。最后,通过一些实际应用案例来验证
一种旋转不变的多光谱图像的描述子匹配方法.pdf
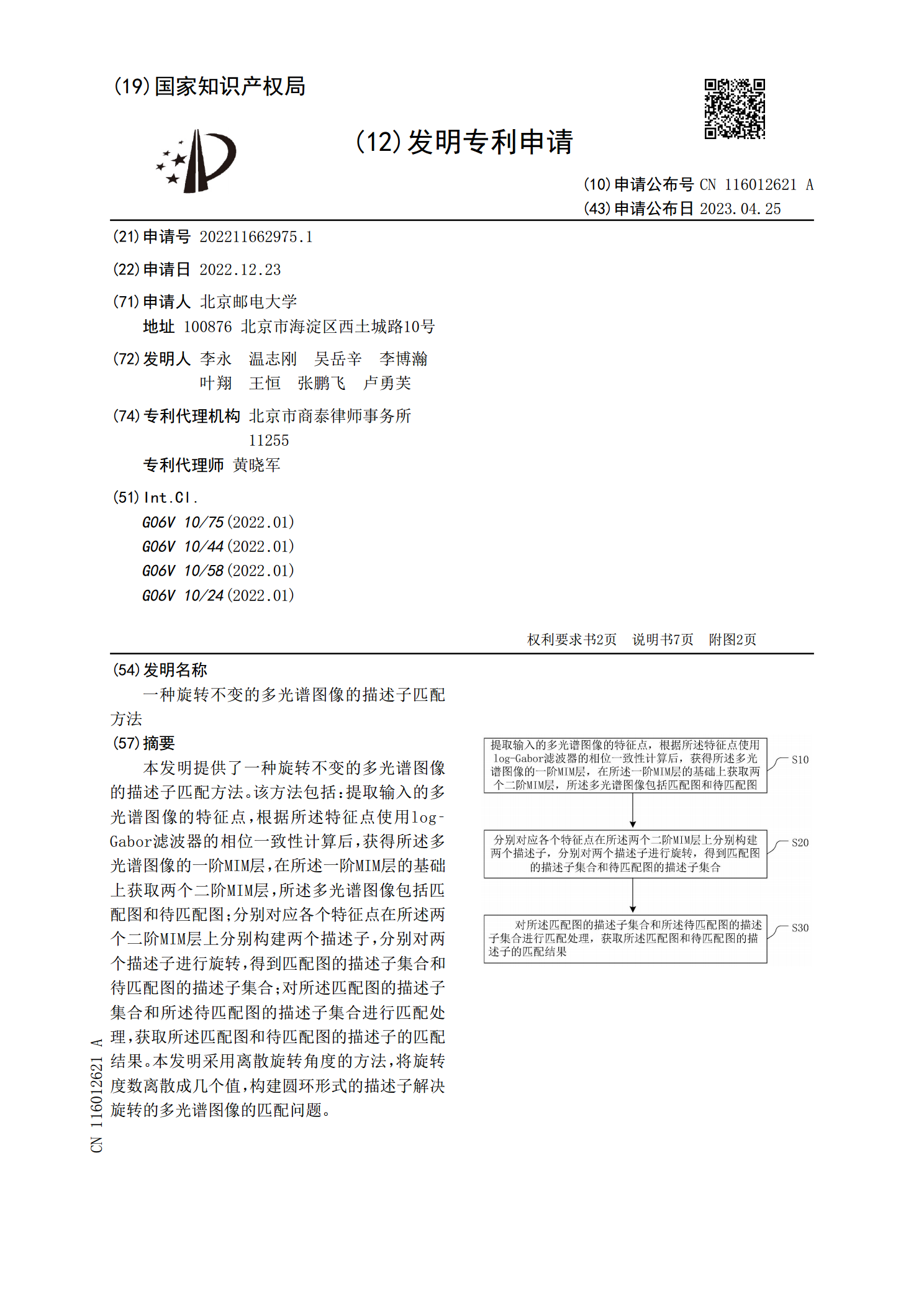
本发明提供了一种旋转不变的多光谱图像的描述子匹配方法。该方法包括:提取输入的多光谱图像的特征点,根据所述特征点使用log‑Gabor滤波器的相位一致性计算后,获得所述多光谱图像的一阶MIM层,在所述一阶MIM层的基础上获取两个二阶MIM层,所述多光谱图像包括匹配图和待匹配图;分别对应各个特征点在所述两个二阶MIM层上分别构建两个描述子,分别对两个描述子进行旋转,得到匹配图的描述子集合和待匹配图的描述子集合;对所述匹配图的描述子集合和所述待匹配图的描述子集合进行匹配处理,获取所述匹配图和待匹配图的描述子的匹

基于多尺度梯度域引导滤波的低照度图像增强算法.docx
基于多尺度梯度域引导滤波的低照度图像增强算法基于多尺度梯度域引导滤波的低照度图像增强算法摘要:在现实生活中,低照度图像经常受到环境光线不足、传感器噪声、对比度降低等问题的影响,导致图像细节难以辨认。为了解决这一问题,本文提出了一种基于多尺度梯度域引导滤波的低照度图像增强算法。该算法通过将低照度图像转换为梯度图像,在多个尺度上对梯度图像进行引导滤波来增强图像细节,并通过自适应增强算法进一步优化图像对比度。实验结果表明,该算法在提高低照度图像质量方面具有较好的效果。关键词:低照度图像增强;梯度域;引导滤波;多

基于多注意力多尺度特征融合的图像描述生成算法.docx
基于多注意力多尺度特征融合的图像描述生成算法标题:基于多注意力多尺度特征融合的图像描述生成算法摘要:图像描述生成是计算机视觉领域的重要研究方向之一,其旨在将图像内容转化为语义化的自然语言描述。本论文提出了一种基于多注意力多尺度特征融合的图像描述生成算法。该算法通过引入多尺度感受野,利用不同尺度下的特征信息,并通过多注意力机制对这些特征进行融合,从而提升图像描述生成的性能。1.引言随着计算机视觉和自然语言处理的快速发展,图像描述生成在多个领域中得到广泛应用。然而,现有的图像描述生成算法在考虑全局和局部特征时