
基于KAZE特征匹配的指针式仪表自动读数方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于KAZE特征匹配的指针式仪表自动读数方法.docx
基于KAZE特征匹配的指针式仪表自动读数方法基于KAZE特征匹配的指针式仪表自动读数方法摘要:指针式仪表是工业和交通领域中常见的用于测量和显示物理量的设备。但是,传统的手动读数方法存在一些问题,比如读数误差大、速度慢等。为了解决这些问题,本文提出了一种基于KAZE特征匹配的指针式仪表自动读数方法。该方法利用计算机视觉技术对仪表进行检测和分析,通过提取和匹配KAZE特征点来准确地识别指针位置并实现自动读数。实验证明,该方法能够有效地提高仪表读数的精度和速度。1.引言指针式仪表是测量和显示物理量的重要设备,广
一种基于语义分割的指针式仪表自动读数方法.pdf
本申请公开了一种基于语义分割的指针式仪表自动读数方法,该方法包括:获取仪表的原始图像;构建DeepLabV3语义分割模型,将原始图像输入至训练好的DeepLabV3语义分割模型,得到分割的指针像素区域与刻度像素区域;分别计算指针的角度与每条刻度的角度,根据指针的角度与每条刻度的角度判断指针落在哪两条相邻刻度之间,获取指针读数。本发明提供的指针与刻度的角度计算方法采用指向性的方法,使得角度计算具有唯一性,准确度较高。
一种基于深度学习的指针式仪表自动读数方法.pdf
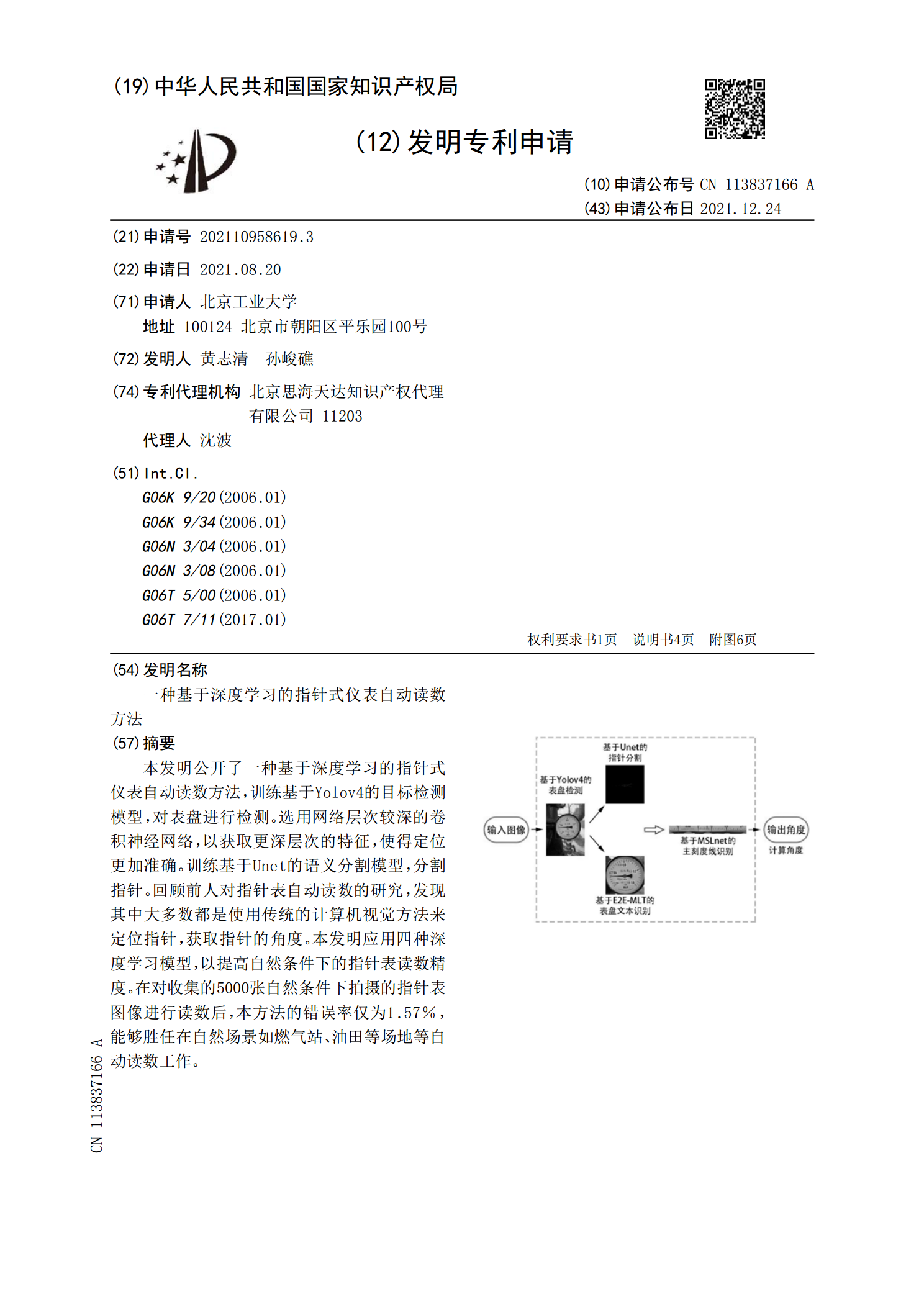
本发明公开了一种基于深度学习的指针式仪表自动读数方法,训练基于Yolov4的目标检测模型,对表盘进行检测。选用网络层次较深的卷积神经网络,以获取更深层次的特征,使得定位更加准确。训练基于Unet的语义分割模型,分割指针。回顾前人对指针表自动读数的研究,发现其中大多数都是使用传统的计算机视觉方法来定位指针,获取指针的角度。本发明应用四种深度学习模型,以提高自然条件下的指针表读数精度。在对收集的5000张自然条件下拍摄的指针表图像进行读数后,本方法的错误率仅为1.57%,能够胜任在自然场景如燃气站、油田等场地

指针式仪表自动读数动态识别方法.docx
指针式仪表自动读数动态识别方法指针式仪表自动读数动态识别方法摘要:指针式仪表是一种常见的测量仪器,广泛应用于工业控制和实验室测试中,但人工读数存在时间耗费高、容易出错等问题。针对这些问题,本论文提出了一种指针式仪表自动读数的动态识别方法。该方法基于计算机视觉技术,通过图像处理和特征提取等步骤,实现了对指针位置的准确识别和读数结果的自动提取。实验结果表明,该方法能够有效地识别指针位置并实现自动读数,具有较高的准确性和稳定性。关键词:指针式仪表、自动读数、动态识别、计算机视觉引言指针式仪表作为一种常见的测量仪
指针式仪表自动读数的研究及应用.pptx
汇报人:CONTENTS添加章节标题引言背景介绍研究目的和意义研究范围和方法指针式仪表基本原理及结构指针式仪表基本原理指针式仪表结构及工作原理指针式仪表的优缺点指针式仪表自动读数技术的研究自动读数技术的基本原理自动读数技术在指针式仪表中的应用自动读数技术的实现方法及优缺点指针式仪表自动读数技术的实现及应用自动读数技术的硬件实现自动读数技术的软件实现自动读数技术在工业自动化领域的应用自动读数技术在其他领域的应用实验及结果分析实验设计及方法实验结果及分析结果讨论及改进方向结论与展望研究结论研究不足与展望对未来