
基于Creo单驱双向式AGV承重轮设计与仿真.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Creo单驱双向式AGV承重轮设计与仿真.docx
基于Creo单驱双向式AGV承重轮设计与仿真标题:基于Creo单驱双向式AGV承重轮设计与仿真摘要:本论文旨在基于Creo软件对单驱双向式AGV(AutomatedGuidedVehicle,自动导引车)的承重轮进行设计与仿真分析。首先介绍了AGV的背景和应用,然后详细阐述了承重轮的设计原理和要求,并结合Creo软件进行具体的设计与仿真。最后,通过实际案例分析,验证了所设计的承重轮的性能和可行性。关键词:AGV、承重轮、设计、仿真1.引言AGV是指能够自主导航、避障避让并按照预定路径行驶的自动导引车,广泛
单驱双向AGV驱动装置、AGV和AGV系统.pdf
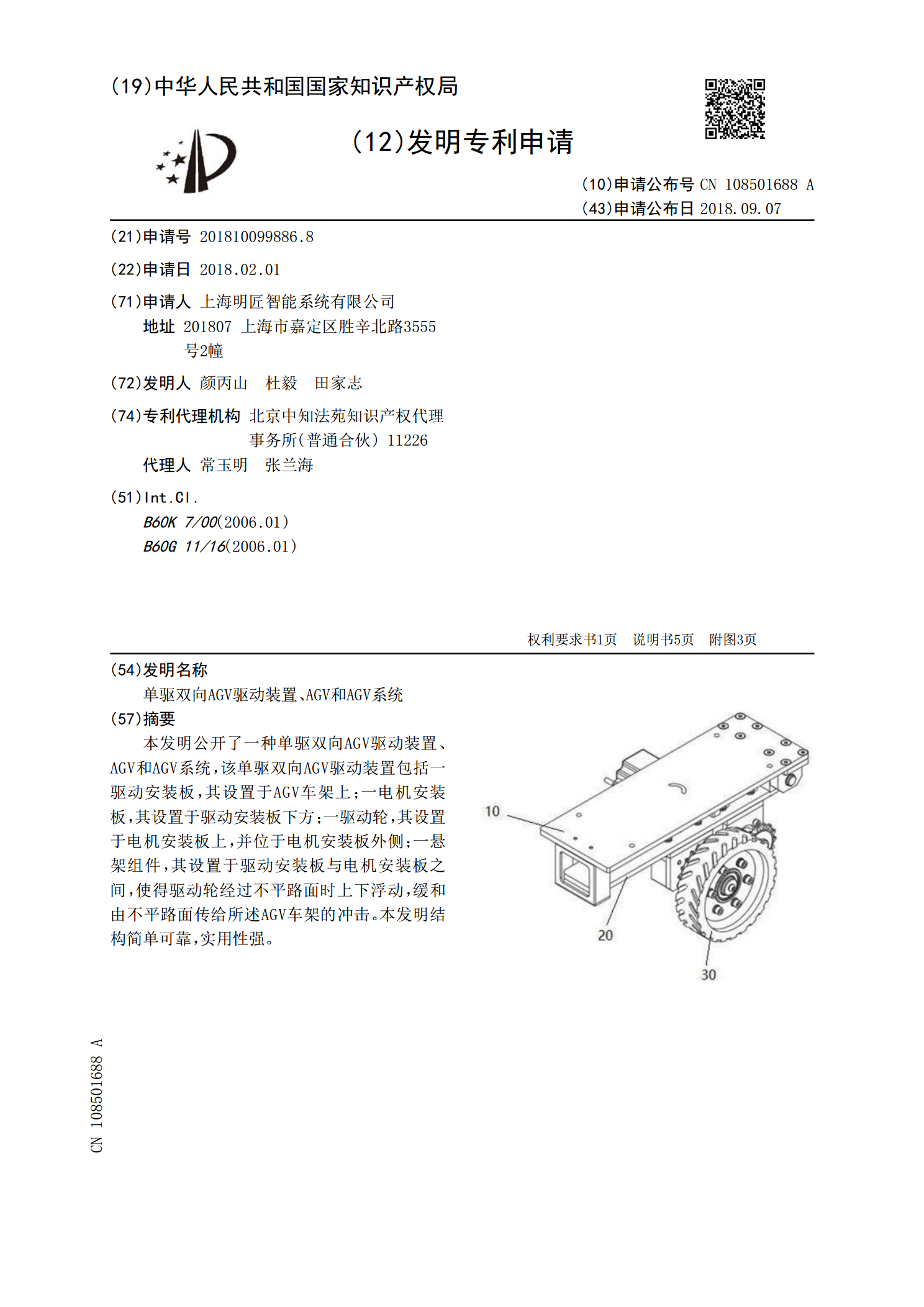
本发明公开了一种单驱双向AGV驱动装置、AGV和AGV系统,该单驱双向AGV驱动装置包括一驱动安装板,其设置于AGV车架上;一电机安装板,其设置于驱动安装板下方;一驱动轮,其设置于电机安装板上,并位于电机安装板外侧;一悬架组件,其设置于驱动安装板与电机安装板之间,使得驱动轮经过不平路面时上下浮动,缓和由不平路面传给所述AGV车架的冲击。本发明结构简单可靠,实用性强。
一种用于非平整地面的单驱双向式AGV小车.pdf
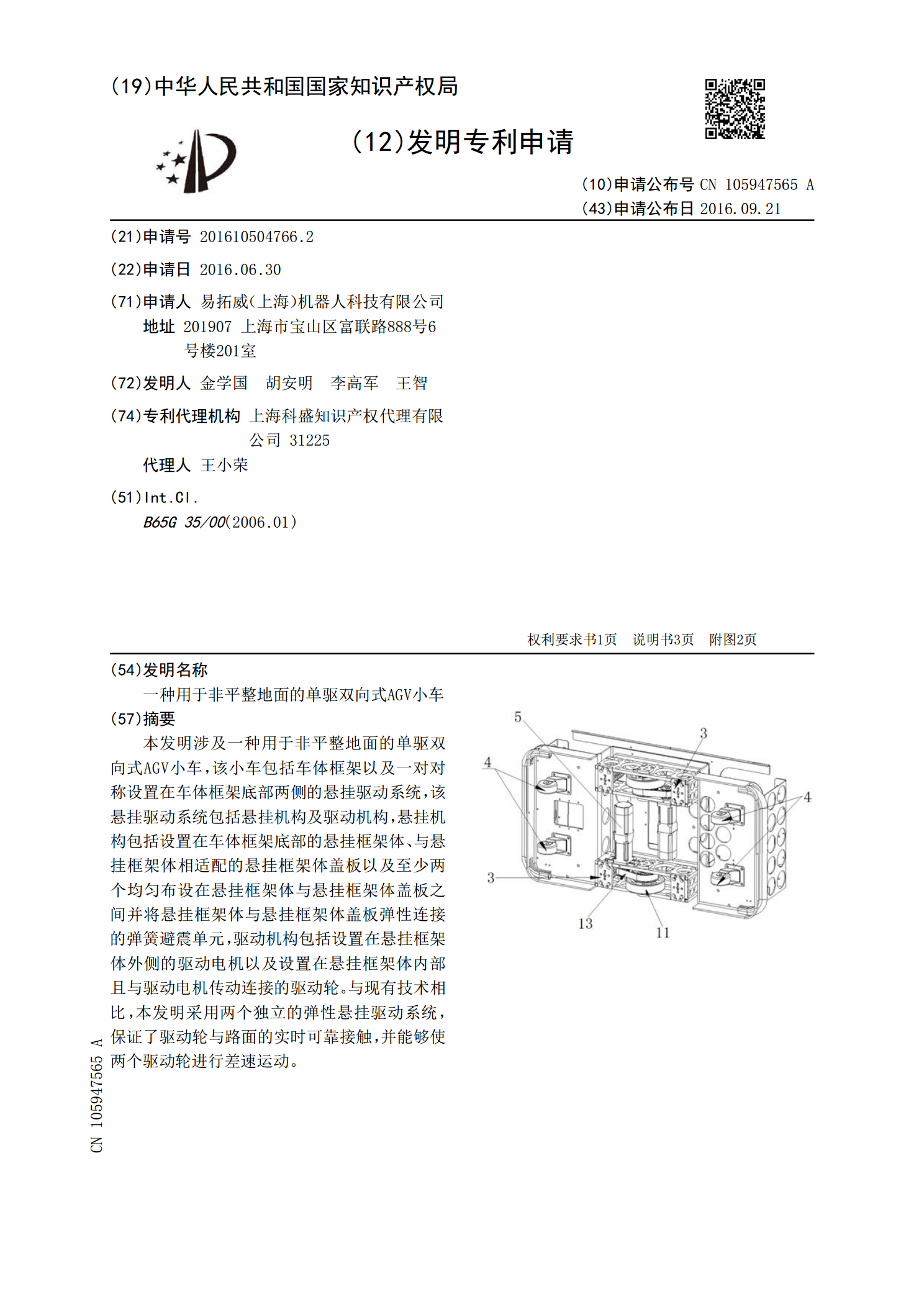
本发明涉及一种用于非平整地面的单驱双向式AGV小车,该小车包括车体框架以及一对对称设置在车体框架底部两侧的悬挂驱动系统,该悬挂驱动系统包括悬挂机构及驱动机构,悬挂机构包括设置在车体框架底部的悬挂框架体、与悬挂框架体相适配的悬挂框架体盖板以及至少两个均匀布设在悬挂框架体与悬挂框架体盖板之间并将悬挂框架体与悬挂框架体盖板弹性连接的弹簧避震单元,驱动机构包括设置在悬挂框架体外侧的驱动电机以及设置在悬挂框架体内部且与驱动电机传动连接的驱动轮。与现有技术相比,本发明采用两个独立的弹性悬挂驱动系统,保证了驱动轮与路面

新型双驱双向AGV.pdf
本发明公开一种新型双驱双向AGV,该新型双驱双向AGV包括车架以及设置在车架上的驱动机构、潜伏机构、背负机构和控制系统;其中:驱动机构包括前后分开布置的两驱动组件,驱动组件包括按预设距离布置在同一转动轴线上的两驱动轮,各驱动轮分别通过一驱动电机独立驱动;潜伏机构包括可从车架的顶部伸出的锁定件以及驱动锁定件升降的驱动件;背负机构包括与车架可拆卸连接的支撑架。本发明可解决双驱动AGV只单独具备背负式结构或潜伏式结构,两种承载结构不能互换,适用范围较小的问题。

双驱双向AGV机器人运动学分析及仿真分析.docx
双驱双向AGV机器人运动学分析及仿真分析双驱双向AGV机器人是一种具有无人化自动导航功能的物流设备,可适用于各种地面运输、存储、装卸等操作。本文将对双驱双向AGV机器人的运动学分析及仿真进行深入研究。一、双驱双向AGV机器人的构成与工作原理双驱双向AGV机器人主要由底盘、货架、导航系统、控制系统等部分组成。其中底盘是机器人的骨架,其上安装有驱动轮、转向轮、电机等运动部件。货架是支撑物料的部分,可以根据需要定制不同尺寸和形状。导航系统采用激光雷达、摄像头等设备实现机器人的自动导航。控制系统则是整个机器人的“